
TBB206GGGEG 改变传动比和传动系数
发布时间:2019/12/18 21:59:21 访问次数:1321
TBB206GGGEG而根据式(5-3),传动系数又表示克服单位铰链力矩所需杆力的大小,即操纵系数大,操纵飞机费力,操纵系数小,操纵飞机省力.
由此可得出以下结论:操纵灵敏性较高的轻型飞机(如战斗机)的传动系数一般较大,而操纵灵敏性较低而舵面较大的运输机的传动系数一般较小。
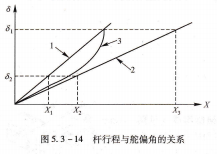
改变传动比和传动系数的机构―非线性传动机构操纵系统中,如果没有特殊的机构来改变传动系数,舵偏角ε随杆行程X的变化近似地成直线关系(见图5.3-14中直线1、2),即线性关系。
线性传动的操纵系统对低速飞机比较合适,但往往不能满足高速飞机的操纵性要求。因为高速飞机的飞行速度范围很大,传动系数较大的操纵系统只能满足小速度飞行时的杆行程与舵偏角的关系,操纵性要求,而不能满足大速度飞行时的要求;传动系数较小的操纵系统只能满足大速度飞行时的操纵性要求,而不能满足小速度飞行时的要求。
例如,在小速度飞行时,由于动压较小,舵面效能比较低,需要较大的舵面偏转角才能操纵飞机做一定的机动动作,对于采用如直线2那样的传动关系的操纵系统来说,需要的杆行程很大,操纵显得过于迟钝,只有采用如直线1那样的传动关系的操纵系统,需要的杆行程才较合适。
在大速度飞行的情况下,由于动压较大,舵面效能比较高,不需要很大的舵偏角,对于采用如直线1那样的传动关系的操纵系统来说,需要的杆行程很小,操纵显得过于灵敏,很难准确操纵,只有采用如直线2那样的传动关系的操纵系统,需要的杆行程才较合适。
而现在的飞机上不可能安装多套传动系数各异的操纵系统来满足上述需要,因此在操纵系统中设置了专门的非线性传动机构,靠它来改变整个操纵系统的传动系数,以满足高速飞机的操纵性要求。装有非线性传动机构的操纵系统,杆行程与舵面偏角之间,成曲线关系。曲线的形状通常如图5.3-14中曲线3所示。这样,在舵面偏角较小时,杆行程较大(x3>x1),便于驾驶员准确地操纵飞机,而在舵偏角较大时,杆行程又不至于过大(x4<x2)。
电传操纵系统,电传系统提出,机械传动系统的缺点.
由于在机械传动系统中存在着摩擦、间隙和弹性变形,始终难以解决精微操纵信号的传递问题。20世纪70年代初,成功地实现了电传操纵系统,它取代不可逆助力操纵系统而成为新型操纵系统形式。电传操纵系统是控制增稳系统发展的必然产物。若把操纵权限全部赋予控制增稳系统,并使电信号替代机械信号而工作,机械系统处于备用地位,这就是“准电传操纵系统”;若再把各用机械操纵系统取消,就成为“纯电传操纵系统”,简称为“电传操纵系统”。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
TBB206GGGEG而根据式(5-3),传动系数又表示克服单位铰链力矩所需杆力的大小,即操纵系数大,操纵飞机费力,操纵系数小,操纵飞机省力.
由此可得出以下结论:操纵灵敏性较高的轻型飞机(如战斗机)的传动系数一般较大,而操纵灵敏性较低而舵面较大的运输机的传动系数一般较小。
改变传动比和传动系数的机构―非线性传动机构操纵系统中,如果没有特殊的机构来改变传动系数,舵偏角ε随杆行程X的变化近似地成直线关系(见图5.3-14中直线1、2),即线性关系。
线性传动的操纵系统对低速飞机比较合适,但往往不能满足高速飞机的操纵性要求。因为高速飞机的飞行速度范围很大,传动系数较大的操纵系统只能满足小速度飞行时的杆行程与舵偏角的关系,操纵性要求,而不能满足大速度飞行时的要求;传动系数较小的操纵系统只能满足大速度飞行时的操纵性要求,而不能满足小速度飞行时的要求。
例如,在小速度飞行时,由于动压较小,舵面效能比较低,需要较大的舵面偏转角才能操纵飞机做一定的机动动作,对于采用如直线2那样的传动关系的操纵系统来说,需要的杆行程很大,操纵显得过于迟钝,只有采用如直线1那样的传动关系的操纵系统,需要的杆行程才较合适。
在大速度飞行的情况下,由于动压较大,舵面效能比较高,不需要很大的舵偏角,对于采用如直线1那样的传动关系的操纵系统来说,需要的杆行程很小,操纵显得过于灵敏,很难准确操纵,只有采用如直线2那样的传动关系的操纵系统,需要的杆行程才较合适。
而现在的飞机上不可能安装多套传动系数各异的操纵系统来满足上述需要,因此在操纵系统中设置了专门的非线性传动机构,靠它来改变整个操纵系统的传动系数,以满足高速飞机的操纵性要求。装有非线性传动机构的操纵系统,杆行程与舵面偏角之间,成曲线关系。曲线的形状通常如图5.3-14中曲线3所示。这样,在舵面偏角较小时,杆行程较大(x3>x1),便于驾驶员准确地操纵飞机,而在舵偏角较大时,杆行程又不至于过大(x4<x2)。
电传操纵系统,电传系统提出,机械传动系统的缺点.
由于在机械传动系统中存在着摩擦、间隙和弹性变形,始终难以解决精微操纵信号的传递问题。20世纪70年代初,成功地实现了电传操纵系统,它取代不可逆助力操纵系统而成为新型操纵系统形式。电传操纵系统是控制增稳系统发展的必然产物。若把操纵权限全部赋予控制增稳系统,并使电信号替代机械信号而工作,机械系统处于备用地位,这就是“准电传操纵系统”;若再把各用机械操纵系统取消,就成为“纯电传操纵系统”,简称为“电传操纵系统”。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
 相关技术资料
相关技术资料- 8-22首款集成 Balong 6000 5G 调制解调器芯
- 8-22第二代4纳米系统级芯片(SoC)架构骁龙平台
- 8-22集成低压硅基MOSFET应用详解
- 8-22高密度SiC/GaN功率转换控制驱动检测
- 8-22新型高压650V GaN FET—TP65H030G4PRS
- 8-22低噪声 μModule DC/DC 转换器技术参数设计
- 8-21新一代产品RL78 系列微控制器应用简述
- 8-21双端口静态随机存取存储器(SRAM)
- 8-21512kB – 1MB 闪存和 256kB SRAM应用探究
- 8-21480MHz Arm Cortex-M85图形微控制器
- 8-21 RGB 和 MIPI-DSI 接口RA8D1 MC
- 8-21RA 系列的Arm 微控制器 (MCU)

 公网安备44030402000607
公网安备44030402000607





