
TDA12067H1/N1BOBOKN驾驶杆杆力和舵面铰链力矩
发布时间:2019/12/18 21:53:11 访问次数:1002
TDA12067H1/N1BOBOKN差动摇臂,有些飞机的副翼是差动的。所谓差动,是指当驾驶杆左右偏转同一角度时,副翼上下偏转的角度不同。这样做的目的是消除由于副翼偏转造成的两机翼阻力差,消除不必要的偏航(详见飞行原理―副翼差动部分)。实现差动操纵最简单的机构是差动摇臂。
差动摇臂的工作原理如图5.3-11所示,它的一个臂o姓经传动杆AC与驾驶杆相连,一个臂0B经传动杆BD与舵面相连,当驾驶杆在中立位置时,o⒕臂与传动杆AC垂直;另一个臂0B臂与传动臂BD不成直角。
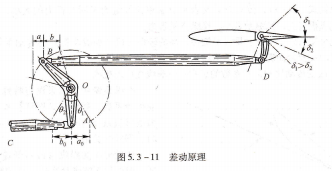
当传动杆AC从中立位置向前或向后移动同样的距离(aO=bO)时,oA臂前、后移动的转角是相等的,因而0B臂前、后移动的转角也相等(e1=ε2)。但从图中可以看出,这时传动杆BD向后移动的距离却大于向前移动的距离(3>@),所以舵面向上的偏转角ε1就大于向下的偏转角ε2。
如果当驾驶杆在中立位时,传动杆z4C与o⒕臂也不成直角,则差动效果更大。
导向滑轮是由三个或四个小滑轮及其支架所组成(见图5.3-12)。它的功用是:支持传动杆,提高传动杆受压时的杆轴临界应力,使传动杆不至于过早地失去总稳定性。并且可以增大传动杆的固有频率,防止传动杆发生共振。
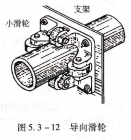
在传动中,传动杆要与导向滑轮摩擦,故维护中应注意检查,防止磨损。
传动系数和非线性机构,操纵系统的传动系数,差动原理小滑轮,导向滑轮.
传动系数的定义,驾驶杆(或脚蹬)移动的距离,简单称为杆(脚蹬)位移,又称杆(脚蹬)行程。它与舵面偏转角度有一定的对应关系。这个对应关系是用传动系数Κ来表示的。
所谓传动系数Κ是指舵偏角Δε与杆位移ΔX的比值(见图5.3-13),即:
Κ=Δε/Δx (5-1)
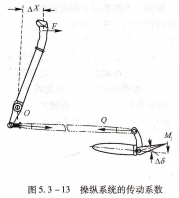
驾驶杆杆力和舵面铰链力矩之间也存在一定的关系,如果不计系统的摩擦力,驾驶杆输人的功等于克
服铰链力矩使舵面偏转的功,即:
F・ΔX=mj・Δε (5-2)
由此可得传动系数的另一个表达式:
Κ=f/mj (5-3)
传动系数的含义,根据式(5-1),传动系数表示:单位杆位移对应的舵偏角的大小。因此,操纵系统的传动系数大,飞机操纵灵敏性好;传动系数小,飞机操纵灵敏性差。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
TDA12067H1/N1BOBOKN差动摇臂,有些飞机的副翼是差动的。所谓差动,是指当驾驶杆左右偏转同一角度时,副翼上下偏转的角度不同。这样做的目的是消除由于副翼偏转造成的两机翼阻力差,消除不必要的偏航(详见飞行原理―副翼差动部分)。实现差动操纵最简单的机构是差动摇臂。
差动摇臂的工作原理如图5.3-11所示,它的一个臂o姓经传动杆AC与驾驶杆相连,一个臂0B经传动杆BD与舵面相连,当驾驶杆在中立位置时,o⒕臂与传动杆AC垂直;另一个臂0B臂与传动臂BD不成直角。
当传动杆AC从中立位置向前或向后移动同样的距离(aO=bO)时,oA臂前、后移动的转角是相等的,因而0B臂前、后移动的转角也相等(e1=ε2)。但从图中可以看出,这时传动杆BD向后移动的距离却大于向前移动的距离(3>@),所以舵面向上的偏转角ε1就大于向下的偏转角ε2。
如果当驾驶杆在中立位时,传动杆z4C与o⒕臂也不成直角,则差动效果更大。
导向滑轮是由三个或四个小滑轮及其支架所组成(见图5.3-12)。它的功用是:支持传动杆,提高传动杆受压时的杆轴临界应力,使传动杆不至于过早地失去总稳定性。并且可以增大传动杆的固有频率,防止传动杆发生共振。
在传动中,传动杆要与导向滑轮摩擦,故维护中应注意检查,防止磨损。
传动系数和非线性机构,操纵系统的传动系数,差动原理小滑轮,导向滑轮.
传动系数的定义,驾驶杆(或脚蹬)移动的距离,简单称为杆(脚蹬)位移,又称杆(脚蹬)行程。它与舵面偏转角度有一定的对应关系。这个对应关系是用传动系数Κ来表示的。
所谓传动系数Κ是指舵偏角Δε与杆位移ΔX的比值(见图5.3-13),即:
Κ=Δε/Δx (5-1)
驾驶杆杆力和舵面铰链力矩之间也存在一定的关系,如果不计系统的摩擦力,驾驶杆输人的功等于克
服铰链力矩使舵面偏转的功,即:
F・ΔX=mj・Δε (5-2)
由此可得传动系数的另一个表达式:
Κ=f/mj (5-3)
传动系数的含义,根据式(5-1),传动系数表示:单位杆位移对应的舵偏角的大小。因此,操纵系统的传动系数大,飞机操纵灵敏性好;传动系数小,飞机操纵灵敏性差。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
 相关技术资料
相关技术资料- 8-22首款集成 Balong 6000 5G 调制解调器芯
- 8-22第二代4纳米系统级芯片(SoC)架构骁龙平台
- 8-22集成低压硅基MOSFET应用详解
- 8-22高密度SiC/GaN功率转换控制驱动检测
- 8-22新型高压650V GaN FET—TP65H030G4PRS
- 8-22低噪声 μModule DC/DC 转换器技术参数设计
- 8-21新一代产品RL78 系列微控制器应用简述
- 8-21双端口静态随机存取存储器(SRAM)
- 8-21512kB – 1MB 闪存和 256kB SRAM应用探究
- 8-21480MHz Arm Cortex-M85图形微控制器
- 8-21 RGB 和 MIPI-DSI 接口RA8D1 MC
- 8-21RA 系列的Arm 微控制器 (MCU)
 公网安备44030402000607
公网安备44030402000607





