
W3780B-T 人工俯仰配平信号
发布时间:2019/12/23 18:02:00 访问次数:1402
W3780B-T上述这些数值和相关位置仅用于说明安定面配平的原理,实际数值和位置取决于飞机当时的空速和飞行姿态。通过这些例子我们能看到安定面前缘向上或向下运动引起飞机的机头向下或向上运动,从而达到配平的目的。
在人工飞行期间,只要接通驾驶盘上的开关,驾驶员就可以对安定面进行配平。在自动驾驶仪工作时,俯仰配平是自动进行的。
俯仰配平系统的组成和工作原理
俯仰配平系统一般由下列子系统组成(见图6.5-2):
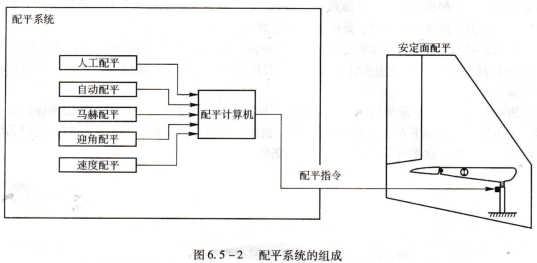
人工配平―从配平开关输人人工配平指令。
自动俯仰配平―当驾驶仪工作时,自动俯仰配平工作。
马赫配平―用于防止马赫数增加时,引起飞机的向下俯冲。
升力安定面在一6°,升降舵卸荷,迎角(α)配平一用于防止飞机高速飞行期间产生大迎角。
速度配平一在起飞和盘旋期间,为飞机提供速度稳定性。
人工配平,当驾驶员拉驾驶杆时,升降舵向上偏转飞机上仰。为了保持这一新的姿态,驾驶员要保持升降舵的偏转量。但是,这样将有很大的空气压力作用在升降舵上,这是我们所不希望的。因此,驾驶员按下主电配平开关使安定面移动。当安定面的前缘向下移动时,驾驶员可以松开作用在驾驶杆上的拉力。此时,升降舵与安定面保持流线型,从而使新的飞行姿态被保持。
来自驾驶杆的人工俯仰配平信号既可以直接加到安定面配平马达,也可以首先加到配平计算机。在那里,一些信号可以得到修正。只要驾驶员保持住配平开关“向上”或“向下”的位置,安定面就持续地移动。
自动驾驶仪配平,当自动驾驶仪工作时,自动驾驶仪的俯仰配平功能总是起作用的。自动驾驶仪的杆探测器探测升降舵的偏转量,或者从升降舵位置传感器直接进行测量。当升降舵的偏转超出一定量时,配平计算机发出指令,使安定面配平马达工作。当自动驾驶仪将升降舵位置减小到零时,配平系统再将马达停转。
当驾驶员按下驾驶杆上的配平开关时.自动驾驶仪脱开。于是,配平系统又回到人工配平状态。
马赫配平,当马赫数增加时,飞机的升力中心将向后移动。这将使飞机产生低头力矩,从而引起飞机向下俯冲。在飞行中,应该避免这种状态的发生。马赫配平系统完成的就是这一任务。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
W3780B-T上述这些数值和相关位置仅用于说明安定面配平的原理,实际数值和位置取决于飞机当时的空速和飞行姿态。通过这些例子我们能看到安定面前缘向上或向下运动引起飞机的机头向下或向上运动,从而达到配平的目的。
在人工飞行期间,只要接通驾驶盘上的开关,驾驶员就可以对安定面进行配平。在自动驾驶仪工作时,俯仰配平是自动进行的。
俯仰配平系统的组成和工作原理
俯仰配平系统一般由下列子系统组成(见图6.5-2):
人工配平―从配平开关输人人工配平指令。
自动俯仰配平―当驾驶仪工作时,自动俯仰配平工作。
马赫配平―用于防止马赫数增加时,引起飞机的向下俯冲。
升力安定面在一6°,升降舵卸荷,迎角(α)配平一用于防止飞机高速飞行期间产生大迎角。
速度配平一在起飞和盘旋期间,为飞机提供速度稳定性。
人工配平,当驾驶员拉驾驶杆时,升降舵向上偏转飞机上仰。为了保持这一新的姿态,驾驶员要保持升降舵的偏转量。但是,这样将有很大的空气压力作用在升降舵上,这是我们所不希望的。因此,驾驶员按下主电配平开关使安定面移动。当安定面的前缘向下移动时,驾驶员可以松开作用在驾驶杆上的拉力。此时,升降舵与安定面保持流线型,从而使新的飞行姿态被保持。
来自驾驶杆的人工俯仰配平信号既可以直接加到安定面配平马达,也可以首先加到配平计算机。在那里,一些信号可以得到修正。只要驾驶员保持住配平开关“向上”或“向下”的位置,安定面就持续地移动。
自动驾驶仪配平,当自动驾驶仪工作时,自动驾驶仪的俯仰配平功能总是起作用的。自动驾驶仪的杆探测器探测升降舵的偏转量,或者从升降舵位置传感器直接进行测量。当升降舵的偏转超出一定量时,配平计算机发出指令,使安定面配平马达工作。当自动驾驶仪将升降舵位置减小到零时,配平系统再将马达停转。
当驾驶员按下驾驶杆上的配平开关时.自动驾驶仪脱开。于是,配平系统又回到人工配平状态。
马赫配平,当马赫数增加时,飞机的升力中心将向后移动。这将使飞机产生低头力矩,从而引起飞机向下俯冲。在飞行中,应该避免这种状态的发生。马赫配平系统完成的就是这一任务。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
 相关技术资料
相关技术资料- 8-724位单相交流/直流功率监测IC
- 8-7集成电流传感器IC和温度传感器应用简述
- 8-7触摸控制器(PTC)优势特征
- 8-7PIC32CM5164JH01048 微控制器
- 8-7512 KB闪存和64 KB静态随机存取存储器
- 8-7PIC32CM JH系列微控制器(MCU)应用详解
- 8-6首款新结构硅基外腔混合集成光源芯片
- 8-6全大核架构 X930 超大核的全大核 CPU 简述
- 8-6计算子系统(Compute Sub Systems,CSS)
- 8-6Neoverse CSS V3 架构AI CPU C
- 8-6Arm Neoverse CPU数据中心芯片
- 8-6Dimensity 9400芯片应用探究

 公网安备44030402000607
公网安备44030402000607





