

适应寄生谐振
发布时间:2019/4/28 20:48:25 访问次数:1488
适应寄生谐振
虽然上述线性模型没有确定稳定性的充分条件,但是通过仿真已经发现,模型中缺少相位裕度是不稳定的充分条件。在以下分析中我们使用这种强大的能力来评估各种补偿方案的稳健性。
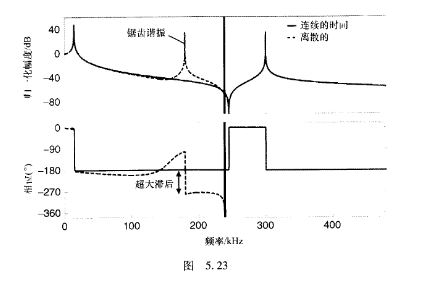
虽然实际的陀螺仪通常在宽范围的频率内具有无数的谐振模式,但是为了简单起见,我们考虑一个假设的传感器,除了在15kHz的主谐振之外,在aOokHz下只有一个寄生谐振。图5。⒛显示了采样率为480kHz时传感器与离散机电链的频率响应。由于并置控制能确保在连续谐振之间存在恢复相位的反谐振,所以连续时间相位响应不超过-180℃阈值。然而,在第二奈奎斯特区的寄生谐振,由于在奈奎斯特区的信号与反相相位相互混淆,所以具有非常大的超过相位延迟的衰减。不幸的是,增加采样速率使所有的谐振低于奈奎斯特频率,既不切实际也是无效的。不切实际是因为感应和寄生电容以及真实传感器的布线电阻使时间为常数限制了最大的采样速率。无效是因为在机电链中的处理时延和其他的时延引进额外的相位延迟,迫使离散化相位响应即使在没有寄生谐振的情况下远远低于
-180°。因此,该示例中的超大相位延迟相当常见。我们现在评估各种补偿方案的能力,以适应具有这种超大相位延迟的寄生谐振。
适应寄生谐振
虽然上述线性模型没有确定稳定性的充分条件,但是通过仿真已经发现,模型中缺少相位裕度是不稳定的充分条件。在以下分析中我们使用这种强大的能力来评估各种补偿方案的稳健性。
虽然实际的陀螺仪通常在宽范围的频率内具有无数的谐振模式,但是为了简单起见,我们考虑一个假设的传感器,除了在15kHz的主谐振之外,在aOokHz下只有一个寄生谐振。图5。⒛显示了采样率为480kHz时传感器与离散机电链的频率响应。由于并置控制能确保在连续谐振之间存在恢复相位的反谐振,所以连续时间相位响应不超过-180℃阈值。然而,在第二奈奎斯特区的寄生谐振,由于在奈奎斯特区的信号与反相相位相互混淆,所以具有非常大的超过相位延迟的衰减。不幸的是,增加采样速率使所有的谐振低于奈奎斯特频率,既不切实际也是无效的。不切实际是因为感应和寄生电容以及真实传感器的布线电阻使时间为常数限制了最大的采样速率。无效是因为在机电链中的处理时延和其他的时延引进额外的相位延迟,迫使离散化相位响应即使在没有寄生谐振的情况下远远低于
-180°。因此,该示例中的超大相位延迟相当常见。我们现在评估各种补偿方案的能力,以适应具有这种超大相位延迟的寄生谐振。
上一篇:初始系统架构和模型稳定性分析
上一篇:传统超前补偿
 相关技术资料
相关技术资料- 4-28适应寄生谐振
- 4-24一个完整的晶圆可能包含上千个传感器
 公网安备44030402000607
公网安备44030402000607





