

系统结构
发布时间:2014/12/4 21:05:53 访问次数:552
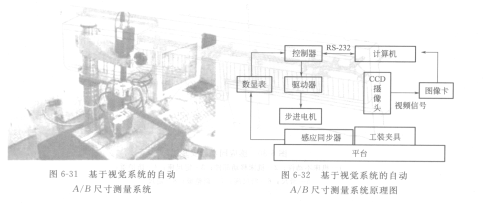
整套系统的外形如图6 31所示。测量系统安装在大理石台上,平稳牢固。 FIN1028MX直径较大,刚性很好,并且上有螺纹,便于摄像头聚焦。摄像头及镜头尺寸很小,美观且不占空间。系统有两个伺服电机(或步进电机),完成水平及垂直方向的运动。水平方向可以实现孑L到孑L的运动、孔到边缘的移动;垂直方向完成图像聚焦。系统光源采用冷光源,并且使用同轴光。
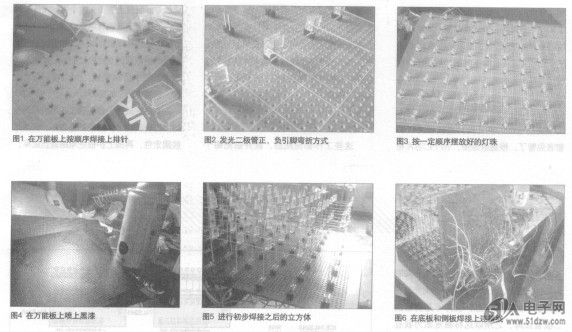
系统使用也极其简单。操作者左手按下开夹的装置,右手上下滑动HGA。测量时,只要在键盘上按动个按键,测量结果自动存到数据库里。整个系统的原理图如图6-32所示。整套系统包括机械子系统右运动执行机构及工装夹具;信号子系统有直线感应同步器、数显表;视觉子系统有CCD摄像头、光源、图像卡;上位机有控制子系统的PC机;下位机有控制子系统MSC-51单片机、步进电机、驱动电源。
系统的工作原理是:CCD摄像头将摄入的图像传给图像卡,图像卡将图像转换成数字图像,数字图像再经计算机上应用软件处理提取有用信息,提供给计算A/B尺寸使用,X-y运动信号由计算机发出,通过RS-232接口传送给控制器,控制器通过驱动器来驱动步进电机;工作台的坐标位置由感应同步器进行精确测量,结果由数显表传递给控制器,控制器再将数据传回给计算机,计算机将数据比较后再发出指令,让步进电机进行误差补偿,从而形成一个闭环控制。
A/B尺寸自动测量仪的检测方法与偏测试仪的检测方法差不多,也是检测出两个圆心及浮动块的两条边,然后计算出A和B的尺寸,所不同的是全部工作由计算机完成。其精度可达0. ltim,完全能够满足要求。
整套系统的外形如图6 31所示。测量系统安装在大理石台上,平稳牢固。 FIN1028MX直径较大,刚性很好,并且上有螺纹,便于摄像头聚焦。摄像头及镜头尺寸很小,美观且不占空间。系统有两个伺服电机(或步进电机),完成水平及垂直方向的运动。水平方向可以实现孑L到孑L的运动、孔到边缘的移动;垂直方向完成图像聚焦。系统光源采用冷光源,并且使用同轴光。
系统使用也极其简单。操作者左手按下开夹的装置,右手上下滑动HGA。测量时,只要在键盘上按动个按键,测量结果自动存到数据库里。整个系统的原理图如图6-32所示。整套系统包括机械子系统右运动执行机构及工装夹具;信号子系统有直线感应同步器、数显表;视觉子系统有CCD摄像头、光源、图像卡;上位机有控制子系统的PC机;下位机有控制子系统MSC-51单片机、步进电机、驱动电源。
系统的工作原理是:CCD摄像头将摄入的图像传给图像卡,图像卡将图像转换成数字图像,数字图像再经计算机上应用软件处理提取有用信息,提供给计算A/B尺寸使用,X-y运动信号由计算机发出,通过RS-232接口传送给控制器,控制器通过驱动器来驱动步进电机;工作台的坐标位置由感应同步器进行精确测量,结果由数显表传递给控制器,控制器再将数据传回给计算机,计算机将数据比较后再发出指令,让步进电机进行误差补偿,从而形成一个闭环控制。
A/B尺寸自动测量仪的检测方法与偏测试仪的检测方法差不多,也是检测出两个圆心及浮动块的两条边,然后计算出A和B的尺寸,所不同的是全部工作由计算机完成。其精度可达0. ltim,完全能够满足要求。
上一篇:系统特点
 相关技术资料
相关技术资料- 12-4系统结构
热门点击
- 差动变压器式传感器的应用
- 磁阻元件的主要特性
- 应变极限和疲劳寿命应变片的线性
- 霍尔传感器的差动放大电路
- 阶梯特性、阶梯误差、分辨率
- 机器人视觉与触觉的融合在智能机器人中
- 在Multisim中添加LabVIEW交互接
- 逐渐形成了多层次ISP结构的因特网
- 脉冲盘式编码器
- 在Multisim中添加LabVIEW交互接
推荐技术资料
- 单片机版光立方的制作
- N视频: http://v.youku.comN_sh... [详细]
 公网安备44030402000607
公网安备44030402000607





