
光学视觉定位Fiducial(基准校准)的原理和过程
发布时间:2014/5/2 18:50:28 访问次数:2902
PCB Mark的作用和PCB基准校准的原理见10.7节。
下面以西门子HF系列垂直贴装头为例,介绍Fiducial的对中原理和对中、定位过程。
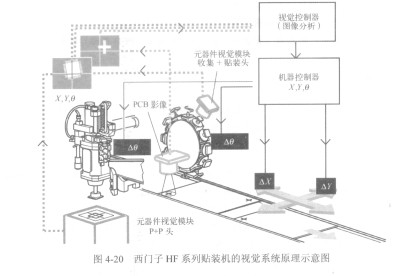
从图4-20中可以看出:T52SURWA/S530-A3贴装头拾取元器件后,元器件视觉模块收集获取元器件的影像和图像信息;经过视觉控制器,进行图像分析;进行PCB方位识别及光学定位;最后,通过机器控制器修整,坐标和臼(转角),实现高速度、高可靠的贴装精度。
图4-20西门予HF系列贴装机的视觉系统原理示意图
元器件贴片位置光学视觉对中原理和过程
完成PCB基准校准后,吸嘴到送料器上拾取元器件,然后对拾取的元器件底部(上视)照相。小元器件用贴装头上的扫描CCD,大的元器件用固定CCD,然后与该元器件在图像库中的标准图像比较,对元器件进行确认。比较的内容如下。
①比较图像是否正确,如果图像不正确,则贴装机认为该元器件的型号错误,会根据程序设置抛弃元器件, 元器件若干次后报警停机。
②将引脚变形和共面性不合格的元器件识别出来并送至程序指定的抛料位置。
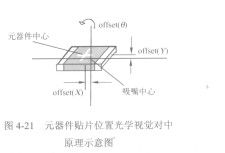
③比较该元器件拾取后的中心坐标X. y、转角臼与标准图像是否一致,如果有偏移,贴片时贴装机会自动将 图4-21元器件贴片位置光学视觉对中原理示意图。拾片偏移量[offset(X)、offset(功、offset(例修正到该元器件的贴片坐标中,从而保证每个元器件的贴裴精度,如图4-21所示。
PCB Mark的作用和PCB基准校准的原理见10.7节。
下面以西门子HF系列垂直贴装头为例,介绍Fiducial的对中原理和对中、定位过程。
从图4-20中可以看出:T52SURWA/S530-A3贴装头拾取元器件后,元器件视觉模块收集获取元器件的影像和图像信息;经过视觉控制器,进行图像分析;进行PCB方位识别及光学定位;最后,通过机器控制器修整,坐标和臼(转角),实现高速度、高可靠的贴装精度。
图4-20西门予HF系列贴装机的视觉系统原理示意图
元器件贴片位置光学视觉对中原理和过程
完成PCB基准校准后,吸嘴到送料器上拾取元器件,然后对拾取的元器件底部(上视)照相。小元器件用贴装头上的扫描CCD,大的元器件用固定CCD,然后与该元器件在图像库中的标准图像比较,对元器件进行确认。比较的内容如下。
①比较图像是否正确,如果图像不正确,则贴装机认为该元器件的型号错误,会根据程序设置抛弃元器件, 元器件若干次后报警停机。
②将引脚变形和共面性不合格的元器件识别出来并送至程序指定的抛料位置。
③比较该元器件拾取后的中心坐标X. y、转角臼与标准图像是否一致,如果有偏移,贴片时贴装机会自动将 图4-21元器件贴片位置光学视觉对中原理示意图。拾片偏移量[offset(X)、offset(功、offset(例修正到该元器件的贴片坐标中,从而保证每个元器件的贴裴精度,如图4-21所示。
 相关技术资料
相关技术资料- 5-2光学视觉定位Fiducial(基准校准)的原理和过程
- 相关IC型号
- T52SURWA/S530-A3
- 暂无最新型号
热门点击

 公网安备44030402000607
公网安备44030402000607





