

可以锁定目标的2自由度光电跟踪头
发布时间:2013/11/12 20:02:56 访问次数:820
话说笔者还是个FPS游戏玩家,AT7911EFA-E这个光电跟踪头的结构设计受(使命召唤6:现代战争2(MW2)》中自动机枪的启发,采用了比较复杂的连杆机构。这样的结构使这个机器人运动的效果带有一点超现实色彩。想象一下吧,在自己家的桌子上摆这么一个东西,那些游戏发烧友们看到它时的表情一定很精彩!
自由度光电跟踪头的整体制作仍然贯彻以往的制作方针,即低成本、高趣味性和艺术性。跟踪头的核心部分由两个独立的神经元电路分别控制的两个电机组成,因为采用了比较高缎的模拟神经元电路,相对于前一个以数字逻辑控制的跟踪头,它的运动变得更加“聪明”。
光电跟踪头使用两只电机驱动,在制作上增加了不小的难度。但是对于喜欢动手制作的“魔术师”来说,有难度才有激情!引用《妙警贼探》里的一句话,就是:“It makes the world go round(是激情让地球运转的)。”
下面正式开始制作这个2自由度光电跟踪头。
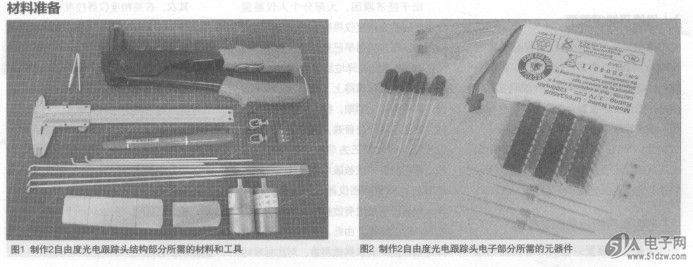
光电跟踪头感光元件的选择方法参见《超简单的单自由度光电跟踪头》-文。
74HC240在这里作为两组神经元电路使用,为了使神经元可以驱动减速电机,还需要配备双向电机驱动电路。我在制作中使用的是74HC245_态总线收发器,你也可以使用74HC240、以分立元件构成的H桥,或其他专用的电机驱动IC。
74HC245是我个人比较喜欢的一块代用型双向电机驱动芯片。和74HC240一样,它里面的每个缓>中器的输出电流也是±35mA,为了驱动电机,同样需要多组缓>中器并联使用。它的优点是芯片以把它改装成一块不错的双向电机驱动模块。
74HC245的跳线方式见图3。因为是收发器,这个电路有两种方向不同的接法,这使得芯片上的缠绕焊接变得非常灵活,你可以选择让芯片的正面或背面露在外面(从美观和艺术的角度考虑)。
图3左侧是我常用的接法。第10、1 9脚的接地线可以在芯片背面做一根跳线,第1、20脚电源正极的跳线可以做在芯片侧面。两只电机的4路输入、输出布局很清晰,将对应引脚就近短接在一起就可以了。单个芯片连接,电机每相的最大电流是±70mA,稍显不足,一般要把两片74HC245井联起来使用。
74HC245内部集成了1 6个缓冲器,由第1、1 9脚的使能端进行选通控制。如
电机为小型机器人常用的中型减速电机,标称电压6V,要求电机的转速低于30dmin。这次使用中型电机是从整体设计考虑的,你也可以用N20电机制作一个缩小版。电路使用一块3.7V的锂电池供电,电机实际工作时的转速还会更低。
端子芯取自工业连接器里面的接线排座。端子芯的结构和使用方法参见前面的文章。从常见的蓝色接线端子里拆出的铜
芯如图4所示。
空气开关的端子作为电机轴连器使用,这次我使用的电机输出轴颈为5mm,只有空气开关这种大电流器件里面的端子才能保证足够的安装空间。
锂电池和充电器的介绍见上期文章中的内容。机器人使用两位镀金排针、排座作为充电接口。
话说笔者还是个FPS游戏玩家,AT7911EFA-E这个光电跟踪头的结构设计受(使命召唤6:现代战争2(MW2)》中自动机枪的启发,采用了比较复杂的连杆机构。这样的结构使这个机器人运动的效果带有一点超现实色彩。想象一下吧,在自己家的桌子上摆这么一个东西,那些游戏发烧友们看到它时的表情一定很精彩!
自由度光电跟踪头的整体制作仍然贯彻以往的制作方针,即低成本、高趣味性和艺术性。跟踪头的核心部分由两个独立的神经元电路分别控制的两个电机组成,因为采用了比较高缎的模拟神经元电路,相对于前一个以数字逻辑控制的跟踪头,它的运动变得更加“聪明”。
光电跟踪头使用两只电机驱动,在制作上增加了不小的难度。但是对于喜欢动手制作的“魔术师”来说,有难度才有激情!引用《妙警贼探》里的一句话,就是:“It makes the world go round(是激情让地球运转的)。”
下面正式开始制作这个2自由度光电跟踪头。
光电跟踪头感光元件的选择方法参见《超简单的单自由度光电跟踪头》-文。
74HC240在这里作为两组神经元电路使用,为了使神经元可以驱动减速电机,还需要配备双向电机驱动电路。我在制作中使用的是74HC245_态总线收发器,你也可以使用74HC240、以分立元件构成的H桥,或其他专用的电机驱动IC。
74HC245是我个人比较喜欢的一块代用型双向电机驱动芯片。和74HC240一样,它里面的每个缓>中器的输出电流也是±35mA,为了驱动电机,同样需要多组缓>中器并联使用。它的优点是芯片以把它改装成一块不错的双向电机驱动模块。
74HC245的跳线方式见图3。因为是收发器,这个电路有两种方向不同的接法,这使得芯片上的缠绕焊接变得非常灵活,你可以选择让芯片的正面或背面露在外面(从美观和艺术的角度考虑)。
图3左侧是我常用的接法。第10、1 9脚的接地线可以在芯片背面做一根跳线,第1、20脚电源正极的跳线可以做在芯片侧面。两只电机的4路输入、输出布局很清晰,将对应引脚就近短接在一起就可以了。单个芯片连接,电机每相的最大电流是±70mA,稍显不足,一般要把两片74HC245井联起来使用。
74HC245内部集成了1 6个缓冲器,由第1、1 9脚的使能端进行选通控制。如
电机为小型机器人常用的中型减速电机,标称电压6V,要求电机的转速低于30dmin。这次使用中型电机是从整体设计考虑的,你也可以用N20电机制作一个缩小版。电路使用一块3.7V的锂电池供电,电机实际工作时的转速还会更低。
端子芯取自工业连接器里面的接线排座。端子芯的结构和使用方法参见前面的文章。从常见的蓝色接线端子里拆出的铜
芯如图4所示。
空气开关的端子作为电机轴连器使用,这次我使用的电机输出轴颈为5mm,只有空气开关这种大电流器件里面的端子才能保证足够的安装空间。
锂电池和充电器的介绍见上期文章中的内容。机器人使用两位镀金排针、排座作为充电接口。
上一篇:校准操作实验战经验
上一篇:2自由度光电跟踪头的电子部分构成
 相关技术资料
相关技术资料- 11-12可以锁定目标的2自由度光电跟踪头
- 11-11光纤维通信的特点及应用
- 相关IC型号
- AT7911EFA-E
- 暂无最新型号
热门点击

 公网安备44030402000607
公网安备44030402000607





