
交流步进定位控制系统
发布时间:2012/6/10 11:55:14 访问次数:530
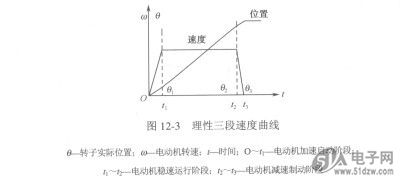
用交流步进传动实现位置KM29W16000AT控制以三段速度曲线为例加以说明,如图12-3所示。
(1)加速启动阶段
在加速启动阶段,让电动机保持最大的转矩启动,由式(12-4)可知,sin8=i时可获得最大转矩,则此时保证矩角8=90。,即保证定子电流幅值恒定,定子电流矢量的位置超前转子矢量90。(电角度)。在控制过程中时刻检测转子的位置,根据转子的当前位置决定下一时刻定子电流的给定值。取bH=12,则给主令脉冲超前转子位置3拍的定子电流矢量,此时,电动机产生最大电磁转矩,转子跟随给定电流的矢量前进。
(2)恒速运行阶段
当电动机在最大转矩作用下加速到设定转速,电动机需在此阶段保持恒速运行,若负载变化不大,定转子磁动势之间的夹角应保持为一个恒定值(负载角)。当负载发生变化引起转速的波动时,在负载角的基础上,适当调整定子电流矢量超前转子的矩角6,使电动机在设定转速稳定运行。
(3)制动阶段
当转子位置大于02时,系统进入减速制动阶段,让电动机保持最大的制动转矩,由式(12-4)可知,sin 8=一1时可获得最大制动转矩,此时控制矩角8=-90。,即保证定子电流幅值恒定,
定子电流矢量的位置滞后转子矢量90。(取bH=12,则定子电流矢量滞后转子位置3拍)。
(4)定位
系统沿曲线减速,当电动机转速时,为保证定位的精确,令定子磁动势的位置
保持在设定的目标位置矿,对应主令脉冲k=k*,由转矩矢量图12-2可知,此时产生复位转矩Tx,Taxsin(kOb-pa),Tx将力图迫使转子回到位置k*Ob上,从而实现电动机的定位控制。
用交流步进传动实现位置KM29W16000AT控制以三段速度曲线为例加以说明,如图12-3所示。
(1)加速启动阶段
在加速启动阶段,让电动机保持最大的转矩启动,由式(12-4)可知,sin8=i时可获得最大转矩,则此时保证矩角8=90。,即保证定子电流幅值恒定,定子电流矢量的位置超前转子矢量90。(电角度)。在控制过程中时刻检测转子的位置,根据转子的当前位置决定下一时刻定子电流的给定值。取bH=12,则给主令脉冲超前转子位置3拍的定子电流矢量,此时,电动机产生最大电磁转矩,转子跟随给定电流的矢量前进。
(2)恒速运行阶段
当电动机在最大转矩作用下加速到设定转速,电动机需在此阶段保持恒速运行,若负载变化不大,定转子磁动势之间的夹角应保持为一个恒定值(负载角)。当负载发生变化引起转速的波动时,在负载角的基础上,适当调整定子电流矢量超前转子的矩角6,使电动机在设定转速稳定运行。
(3)制动阶段
当转子位置大于02时,系统进入减速制动阶段,让电动机保持最大的制动转矩,由式(12-4)可知,sin 8=一1时可获得最大制动转矩,此时控制矩角8=-90。,即保证定子电流幅值恒定,
定子电流矢量的位置滞后转子矢量90。(取bH=12,则定子电流矢量滞后转子位置3拍)。
(4)定位
系统沿曲线减速,当电动机转速时,为保证定位的精确,令定子磁动势的位置
保持在设定的目标位置矿,对应主令脉冲k=k*,由转矩矢量图12-2可知,此时产生复位转矩Tx,Taxsin(kOb-pa),Tx将力图迫使转子回到位置k*Ob上,从而实现电动机的定位控制。
上一篇:交流步进控制与定位矢量的关系
上一篇:管网中有水箱的情况
 相关技术资料
相关技术资料- 6-10交流步进定位控制系统
热门点击
- 高载波频率时变频器输出的电压和电流波形
- 设计振荡电路――考毕兹型振荡电路
- 改变极对数p的调速方法
- 变频器的低速运行
- 三电平变频器
- 循线小车的软件部分
- 各部分的电位和周边电阻值
- 步进电动机基本知识
- 试试字符液晶
- 提高开关速度时的问题
推荐技术资料
- FU-19推挽功放制作
- FU-19是国产大功率发射双四极功率电二管,EPL20... [详细]
 公网安备44030402000607
公网安备44030402000607





