
UPD65802GD-144-5BB压阻式加速度传感器测量
发布时间:2019/11/4 12:23:50 访问次数:970
UPD65802GD-144-5BB由于惯性力的作用,当压阻元件上产生的应变为ε时,则电桥输出电压为压值
usc=uoΚse (对恒压源) (9-28)
usc=rORKse (对恒流源) (9-29)
式中 yO~电源电压;
Ks一电阻元件灵敏系数;
e―T应变量;
R―电桥桥臂电阻;
rO一恒流源电流。
传感器在加速度a的作用下产生的惯性力为
F=ma
悬臂梁根部所受的应力为
σ1=6ml/bh2・a
式中 m一质量块的质量(kg);
b、b―悬臂梁的宽度与厚度(m);
l一质量块中心至悬臂梁根部的距离(m);
a―加速度(g)。
悬臂梁根部产生的应变为
e1=6ml/ebh2・a (9-31)
式中 E一单晶硅的弹性模量。
为了保证输出有良好的线性,设计时一般悬臂梁根部的应变值不应超过400~500ue。
压阻式加速度传感器测量振动加速度时,固有频率应按下式计算:
fo=1/2tebh3/4ml3 (9-33)
压电式加速度传感器是以压电材料为转换元件,输出与加速度成正比的电荷或电压的装置。由于它具有结构简单、工作可靠等一系列优点,目前已成为冲击振动测量技术中广泛使用的一种传感器。世界各国作为量值传递标准的高频和中频标准加速度传感器,都是压电式的。由此可见,质量优良的压电式加速度传感器在精度、长时间稳定性等方面都有独到之处。目前,它的应用范围很广,约占目前所使用的各种加速度传感器总数的80%。压电式加速度传感器量程大,频带宽,体积小,重量轻,安装简单,适用于各种恶劣环境。它广泛地应用于航空、航天、造船、车辆、电气等各系统的振动、冲击测试。在大型客运飞机上,为保证飞行安全,就装有压电式加速度传感器振动监测仪表系统。例如,在B747客机上安装监测用的压电式加速度传感器多达百余个。
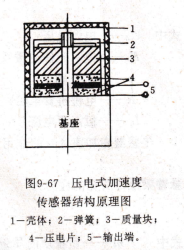
工作原理,图9-67为压电式加速度传感器的结构原理示意图。压电传换元件一般由两块压电片(石英晶片或压电陶瓷片)组成。在压电片的两个表面上镀银层,并在银层上焊接输出引线,或在两压电片之间夹一片金属薄片,引线就焊接在金属薄片上。输出端的另一根引线直接与传感器基座相连。在压电片上放置一个质量块,质量块一般采用比重较大的金属钨或高比重合金制成,在保证所需质量的前提下,使体积尽可能小。为了消除质量块与压电元件之间,以
及压电元件本身之间因加工粗糙造成的接触不良而引起的非线性误差,并且保证传感器在交变力的作用下正常工作,装配时应对压电元件施加预压缩载荷。图9-67中所示的是利用硬弹簧对压电元件施加预压缩载荷的。除此之外,还可以通过螺栓、螺帽等对压电元件预加载荷。静态预载荷的大小应远大于传感器在振动、冲击测试中可能承受的最大动压电式加速度,传感器结构原理图,1一壳体;2一弹簧;3一质量块;4一压电片;5一输出端应力。这样,当传感器向上运动时,质量块产生的惯性力使压电元件上的压应力增加;反之,
当传感器向下运动时,压电元件上的压应力减小。
传感器的整个组件装在一个厚基座上,并用金属壳体加以封罩。为了隔离试件的任何应变传递到压电元件上去,避免由此产生的假信号,所以一般要加厚基座或选用刚度较大的材料来制造,如钛合金、不锈钢等。壳体和基座的质量差不多占传感器总重量的一半。
测量时,将传感器基座与试件刚性固定在一起。当传感器承受振动时,由于弹簧的刚度相当大,而质量块的质量相对较小,可以认为质量块的惯性很小。因此,质量块感受与传感器基座(或试件)相同的振动,并受到与加速度方向相反的惯性力的作用。这样,质量块就有一个正比于加速度的交变力作用在压电元件上。由于压电元件具有压电效应,因此,在它的两个表面上产生交变电荷(或电压)。当试件的振动频率远低于传感器的固有频率时,传感器输出电荷(或电压)与作用力成正比,亦即与试件的加速度成正比。经专用放大器(电
压放大器或电荷放大器)放大后即可测出试件的加速度。
灵敏度是表征压电式加速度传感器性能的一个重要指标,它的定义是输出量(电荷或电压)与输入量(加速度)的比值。当传感器与电荷放大器配合使用时,用电荷灵敏度Kq表示;与电压放大器配合使用时,则用电压灵敏度Κu表示。其一般表达式如下:
Kq=q/a (cs2/m) (9-34)
或
Κu=ua/a (vs2/m)
式中 g一压电式传感器输出电荷量(C);
ua一传感器的开路电压(V);
a―被测加速度(m/s2)。
4位同步二进制加计数器的一种实现方案。图中,4个点画线方框内均采用D触发器与同或门实现r触发器的逻辑功能[如图5,4,9(b)]。由图6.5.11可列出电路的激励方程组
fu=cE
lr=u0=Qo・cE (652)
qw=7170=GO0・cu
tr3=02D100=Q2Q100・CE
可以看出,当计数使能端cE=1时,式(6.5.2)与式(6.5,1)所表达的意义是一致的。
CEr3=g2g1gO,cEr触发器
4位同步二进制加计数器,图6.5.12所示是图6.5.11所示电路的时序图,其中虚线是考虑到触发器传输延迟时间rpd的波形。由图6.5.12可知,在同步计数器中,由于计数脉冲CP同时作用于各触发器,所有触发器的状态刷新是同时进行的,都比计数脉冲CP的作用时间滞后一个tpdo因此,输出状态比异步二进制计数器稳定,其工作速度一般高于异步计数器。应当指出,同步计数器的电路结构比异步计数器复杂,需要增加一些控制电路,其工作速度也要受到这些电路传输延迟时间的限制。
UPD65802GD-144-5BB由于惯性力的作用,当压阻元件上产生的应变为ε时,则电桥输出电压为压值
usc=uoΚse (对恒压源) (9-28)
usc=rORKse (对恒流源) (9-29)
式中 yO~电源电压;
Ks一电阻元件灵敏系数;
e―T应变量;
R―电桥桥臂电阻;
rO一恒流源电流。
传感器在加速度a的作用下产生的惯性力为
F=ma
悬臂梁根部所受的应力为
σ1=6ml/bh2・a
式中 m一质量块的质量(kg);
b、b―悬臂梁的宽度与厚度(m);
l一质量块中心至悬臂梁根部的距离(m);
a―加速度(g)。
悬臂梁根部产生的应变为
e1=6ml/ebh2・a (9-31)
式中 E一单晶硅的弹性模量。
为了保证输出有良好的线性,设计时一般悬臂梁根部的应变值不应超过400~500ue。
压阻式加速度传感器测量振动加速度时,固有频率应按下式计算:
fo=1/2tebh3/4ml3 (9-33)
压电式加速度传感器是以压电材料为转换元件,输出与加速度成正比的电荷或电压的装置。由于它具有结构简单、工作可靠等一系列优点,目前已成为冲击振动测量技术中广泛使用的一种传感器。世界各国作为量值传递标准的高频和中频标准加速度传感器,都是压电式的。由此可见,质量优良的压电式加速度传感器在精度、长时间稳定性等方面都有独到之处。目前,它的应用范围很广,约占目前所使用的各种加速度传感器总数的80%。压电式加速度传感器量程大,频带宽,体积小,重量轻,安装简单,适用于各种恶劣环境。它广泛地应用于航空、航天、造船、车辆、电气等各系统的振动、冲击测试。在大型客运飞机上,为保证飞行安全,就装有压电式加速度传感器振动监测仪表系统。例如,在B747客机上安装监测用的压电式加速度传感器多达百余个。
工作原理,图9-67为压电式加速度传感器的结构原理示意图。压电传换元件一般由两块压电片(石英晶片或压电陶瓷片)组成。在压电片的两个表面上镀银层,并在银层上焊接输出引线,或在两压电片之间夹一片金属薄片,引线就焊接在金属薄片上。输出端的另一根引线直接与传感器基座相连。在压电片上放置一个质量块,质量块一般采用比重较大的金属钨或高比重合金制成,在保证所需质量的前提下,使体积尽可能小。为了消除质量块与压电元件之间,以
及压电元件本身之间因加工粗糙造成的接触不良而引起的非线性误差,并且保证传感器在交变力的作用下正常工作,装配时应对压电元件施加预压缩载荷。图9-67中所示的是利用硬弹簧对压电元件施加预压缩载荷的。除此之外,还可以通过螺栓、螺帽等对压电元件预加载荷。静态预载荷的大小应远大于传感器在振动、冲击测试中可能承受的最大动压电式加速度,传感器结构原理图,1一壳体;2一弹簧;3一质量块;4一压电片;5一输出端应力。这样,当传感器向上运动时,质量块产生的惯性力使压电元件上的压应力增加;反之,
当传感器向下运动时,压电元件上的压应力减小。
传感器的整个组件装在一个厚基座上,并用金属壳体加以封罩。为了隔离试件的任何应变传递到压电元件上去,避免由此产生的假信号,所以一般要加厚基座或选用刚度较大的材料来制造,如钛合金、不锈钢等。壳体和基座的质量差不多占传感器总重量的一半。
测量时,将传感器基座与试件刚性固定在一起。当传感器承受振动时,由于弹簧的刚度相当大,而质量块的质量相对较小,可以认为质量块的惯性很小。因此,质量块感受与传感器基座(或试件)相同的振动,并受到与加速度方向相反的惯性力的作用。这样,质量块就有一个正比于加速度的交变力作用在压电元件上。由于压电元件具有压电效应,因此,在它的两个表面上产生交变电荷(或电压)。当试件的振动频率远低于传感器的固有频率时,传感器输出电荷(或电压)与作用力成正比,亦即与试件的加速度成正比。经专用放大器(电
压放大器或电荷放大器)放大后即可测出试件的加速度。
灵敏度是表征压电式加速度传感器性能的一个重要指标,它的定义是输出量(电荷或电压)与输入量(加速度)的比值。当传感器与电荷放大器配合使用时,用电荷灵敏度Kq表示;与电压放大器配合使用时,则用电压灵敏度Κu表示。其一般表达式如下:
Kq=q/a (cs2/m) (9-34)
或
Κu=ua/a (vs2/m)
式中 g一压电式传感器输出电荷量(C);
ua一传感器的开路电压(V);
a―被测加速度(m/s2)。
4位同步二进制加计数器的一种实现方案。图中,4个点画线方框内均采用D触发器与同或门实现r触发器的逻辑功能[如图5,4,9(b)]。由图6.5.11可列出电路的激励方程组
fu=cE
lr=u0=Qo・cE (652)
qw=7170=GO0・cu
tr3=02D100=Q2Q100・CE
可以看出,当计数使能端cE=1时,式(6.5.2)与式(6.5,1)所表达的意义是一致的。
CEr3=g2g1gO,cEr触发器
4位同步二进制加计数器,图6.5.12所示是图6.5.11所示电路的时序图,其中虚线是考虑到触发器传输延迟时间rpd的波形。由图6.5.12可知,在同步计数器中,由于计数脉冲CP同时作用于各触发器,所有触发器的状态刷新是同时进行的,都比计数脉冲CP的作用时间滞后一个tpdo因此,输出状态比异步二进制计数器稳定,其工作速度一般高于异步计数器。应当指出,同步计数器的电路结构比异步计数器复杂,需要增加一些控制电路,其工作速度也要受到这些电路传输延迟时间的限制。
 相关技术资料
相关技术资料- 8-22首款集成 Balong 6000 5G 调制解调器芯
- 8-22第二代4纳米系统级芯片(SoC)架构骁龙平台
- 8-22集成低压硅基MOSFET应用详解
- 8-22高密度SiC/GaN功率转换控制驱动检测
- 8-22新型高压650V GaN FET—TP65H030G4PRS
- 8-22低噪声 μModule DC/DC 转换器技术参数设计
- 8-21新一代产品RL78 系列微控制器应用简述
- 8-21双端口静态随机存取存储器(SRAM)
- 8-21512kB – 1MB 闪存和 256kB SRAM应用探究
- 8-21480MHz Arm Cortex-M85图形微控制器
- 8-21 RGB 和 MIPI-DSI 接口RA8D1 MC
- 8-21RA 系列的Arm 微控制器 (MCU)

 公网安备44030402000607
公网安备44030402000607





