
调节传感器偏置
发布时间:2019/4/28 20:58:59 访问次数:1423
调节传感器偏置
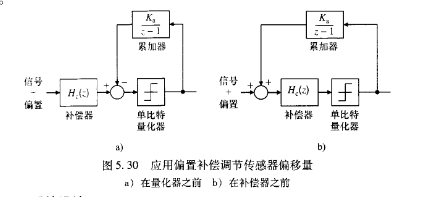
由于制造公差和封装应力,传感器通常受到非理想因素的影响,诸如来自平衡位置的非零的固定位移,以及微分感应和寄生电容之间的失配。 ADA4927-1YCPZ这些非理想因子显示了直流或缓慢的漂移偏置,而这些经常超过传感器总的测量范围[11]。因为在直流时有大量的环路增益,传统的负反馈环路很容易调整偏置。在正反馈结构中直流处的反馈损耗导致了数字转换器前的偏置积累,而这会导致数字转换器增益与期望值相差加大以及随之而来的运行的下降。幸运的是,通过一个缓慢规则的回路,在这其中减去数字转换器前的偏置,问题就很容易解决。或者,在补偿器前应用偏置补偿信号。在这种情况下,信号被添加而不是减去,因为补偿器已经执行了信号的反转。图5,30显示了两个可能的解决方案。校正量化器输出的直流值在这一应用中是可行的,因为科氏力不存在于直流中。我们实现如图5,31中显示的第二种方法,去再次起用已经可用的系统模块。通过这个,当提供所有的模式匹配算法数字实现的必要函数后,我们达成了系统结构,以最大限度地减小模拟复杂性。总的来说,该架构有很强的抗寄生谐振能力。
调节传感器偏置
由于制造公差和封装应力,传感器通常受到非理想因素的影响,诸如来自平衡位置的非零的固定位移,以及微分感应和寄生电容之间的失配。 ADA4927-1YCPZ这些非理想因子显示了直流或缓慢的漂移偏置,而这些经常超过传感器总的测量范围[11]。因为在直流时有大量的环路增益,传统的负反馈环路很容易调整偏置。在正反馈结构中直流处的反馈损耗导致了数字转换器前的偏置积累,而这会导致数字转换器增益与期望值相差加大以及随之而来的运行的下降。幸运的是,通过一个缓慢规则的回路,在这其中减去数字转换器前的偏置,问题就很容易解决。或者,在补偿器前应用偏置补偿信号。在这种情况下,信号被添加而不是减去,因为补偿器已经执行了信号的反转。图5,30显示了两个可能的解决方案。校正量化器输出的直流值在这一应用中是可行的,因为科氏力不存在于直流中。我们实现如图5,31中显示的第二种方法,去再次起用已经可用的系统模块。通过这个,当提供所有的模式匹配算法数字实现的必要函数后,我们达成了系统结构,以最大限度地减小模拟复杂性。总的来说,该架构有很强的抗寄生谐振能力。
 相关技术资料
相关技术资料- 4-28调节传感器偏置
- 4-24传感器的微机械薄膜暴露在压力差下

 公网安备44030402000607
公网安备44030402000607





