

总体方案设计
发布时间:2015/5/18 20:21:50 访问次数:573
根据国内外研究现状, CIM-52S7B以及着陆的条件分析,本节设计以GPS/SINS组合导航系统结合高度表为无人机的主导航系统,以基于跑道上易识别的主动发射特定波段红外辐射合作目标的计算机视觉/SINS结合高度表为辅的无人机导航和着陆的精确导引方案,实现无人机全天候自主精确着陆。
无人机着陆系统的总体框图如图12 - 42所示。在GPS被关闭或受干扰的情况下,SINS导引无人机返回到着陆点附近,再利用计算机视觉探测和识别合作目标,并通过合作目标上的特征点计算出无人机相对于跑道的俯仰角、滚动角以及偏航角等着陆所需参数,再结合SINS和高度表,最终实现无人机全天候精确自主着陆。
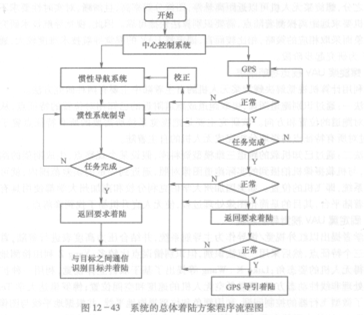
系统总体着陆方案的工作原理如图12 - 43所示。
图12 -43 系统的总体着陆方案程序流程图
无人机起飞前,捷联惯性导航系统和GPS同时启动工作。飞行时,飞行控制系统自动判断GPS是否工作正常。若正常,则利用GPS/SINS的组合导航系统并结合高度表来导航、执行任务以及导引无人机着陆;若不正常,则导航任务主要由惯性导航系统结合高度表来完成。但由于惯性导航系统有随时间累计的导航误差,因而只能引导无人机飞回到着陆跑道附近。
根据国内外研究现状, CIM-52S7B以及着陆的条件分析,本节设计以GPS/SINS组合导航系统结合高度表为无人机的主导航系统,以基于跑道上易识别的主动发射特定波段红外辐射合作目标的计算机视觉/SINS结合高度表为辅的无人机导航和着陆的精确导引方案,实现无人机全天候自主精确着陆。
无人机着陆系统的总体框图如图12 - 42所示。在GPS被关闭或受干扰的情况下,SINS导引无人机返回到着陆点附近,再利用计算机视觉探测和识别合作目标,并通过合作目标上的特征点计算出无人机相对于跑道的俯仰角、滚动角以及偏航角等着陆所需参数,再结合SINS和高度表,最终实现无人机全天候精确自主着陆。
系统总体着陆方案的工作原理如图12 - 43所示。
图12 -43 系统的总体着陆方案程序流程图
无人机起飞前,捷联惯性导航系统和GPS同时启动工作。飞行时,飞行控制系统自动判断GPS是否工作正常。若正常,则利用GPS/SINS的组合导航系统并结合高度表来导航、执行任务以及导引无人机着陆;若不正常,则导航任务主要由惯性导航系统结合高度表来完成。但由于惯性导航系统有随时间累计的导航误差,因而只能引导无人机飞回到着陆跑道附近。
上一篇:固定翼UAV视觉导航系统
上一篇:可见光和红外辐射的对比分析
 相关技术资料
相关技术资料- 5-18总体方案设计
- 相关IC型号
- CIM-52S7B
- 暂无最新型号
热门点击
- 报文交换和分组交换的主要区别
- 数字签名必须保证能够实现以下三点功能
- 激光准直仪的原理和基本结构
- 客户程序和服务器程序通常还具有以下一些主要特
- 临界照明
- 从上面的讨论可以看出,光外差检测具有以下几个
- 最大钳位电压Vc和最大反向峰值脉冲电流/PP
- 双折射现象
- 系统软件总体流程图
- 太阳能电池组件功率计算方法
推荐技术资料

- 泰克新发布的DSA830
- 泰克新发布的DSA8300在一台仪器中同时实现时域和频域分析,DS... [详细]
 公网安备44030402000607
公网安备44030402000607





