
机器人视觉检测的应用
发布时间:2014/12/2 19:00:53 访问次数:692
机器人视觉技术是20世纪80年代发展起来的新兴技术。近年来,AD8609ARUZ机器人视觉技术已经成为高新技术领域一个重要的研究课题,它为可行走机器人、装配机器人的视觉系统提供了技术基础。它将使工业生产方式发生巨大的变化,对人类社会的生活和生产具有深远的影响。视觉信息处理可以看作是从三维环境图像中抽取、描述和解释信息的过程,它可分为六个主要部分:传感、预处理、分割、描述、识别以及知识表达和解释。
机器人视觉系统的组成
机器人视觉系统的组成如图5-49所示,人类感知客观世界有80%的信息是由视觉获得的,所以对于机器人“眼睛”将会是一种重要的感知设备。客观世界的原型应该是景物和图像,用文字难以表达的事物,用一张简单的图就能精辟而准确地表达。
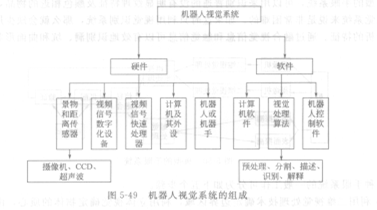
机器人视觉系统要达到实用,至少要满足以下几方面要求:首先是实时性,随着视觉传感器分辨率的提高,每帧图像所要处理的信息量大增,识别一幅图像往往需要几十秒,这当然无法进入实用。随着硬件技术的发展和快速算法的研究,讽别一帧图像的时间可在Is左右,这样才可能满足大部分作业的要求。其次是可靠性,因为视觉系统若作出误识别,轻者损坏工作和机器人,重则可能危及操作人员的生命安全,所以必须要求视觉系统工作可靠。再次是要求有柔性,系统能适应物体的变化和环境的变化,工作对象比较多样,能从事各种不同的作业。机器人视觉系统由硬件和软件两大部分组成。
机器人视觉技术是20世纪80年代发展起来的新兴技术。近年来,AD8609ARUZ机器人视觉技术已经成为高新技术领域一个重要的研究课题,它为可行走机器人、装配机器人的视觉系统提供了技术基础。它将使工业生产方式发生巨大的变化,对人类社会的生活和生产具有深远的影响。视觉信息处理可以看作是从三维环境图像中抽取、描述和解释信息的过程,它可分为六个主要部分:传感、预处理、分割、描述、识别以及知识表达和解释。
机器人视觉系统的组成
机器人视觉系统的组成如图5-49所示,人类感知客观世界有80%的信息是由视觉获得的,所以对于机器人“眼睛”将会是一种重要的感知设备。客观世界的原型应该是景物和图像,用文字难以表达的事物,用一张简单的图就能精辟而准确地表达。
机器人视觉系统要达到实用,至少要满足以下几方面要求:首先是实时性,随着视觉传感器分辨率的提高,每帧图像所要处理的信息量大增,识别一幅图像往往需要几十秒,这当然无法进入实用。随着硬件技术的发展和快速算法的研究,讽别一帧图像的时间可在Is左右,这样才可能满足大部分作业的要求。其次是可靠性,因为视觉系统若作出误识别,轻者损坏工作和机器人,重则可能危及操作人员的生命安全,所以必须要求视觉系统工作可靠。再次是要求有柔性,系统能适应物体的变化和环境的变化,工作对象比较多样,能从事各种不同的作业。机器人视觉系统由硬件和软件两大部分组成。
上一篇:视觉传感器的应用
上一篇:硬件的组成及完成功能
 相关技术资料
相关技术资料- 2-23调节触发电平至“自动”位置处
- 10-31pn结的形成
- 12-2机器人视觉检测的应用
 公网安备44030402000607
公网安备44030402000607





