
32路舵机控制板的电源供给和跳线帽设置
发布时间:2013/11/13 20:48:28 访问次数:3610
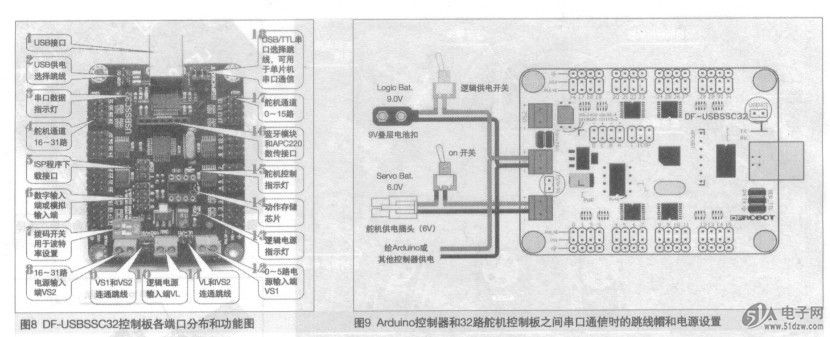
从机接收器上的32路舵机控制板各端口分布和功能如图8所示。
图8中标号为1、9、10、1 1的端口都可以供电,10号端口提供逻辑电源,ATMEGA328P-MU我用9V方块电池供电,12号端口提供舵机电源,我用乐高电池盒里的5节2400mAi]充电电池供电,1 1号“VL和VS1连通跳线帽”不插上,断开,逻辑电源与舵机电源分开供电,由于不用电脑USB供电,所以2号“USB供电选择跳线帽”也不插上,其他跳线帽都插上,蓝开模块插在1 6号“无线数传接口”上。
项目采用Arduino遥控器主机来控制舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心电机、齿轮与位置检测器构成。其工作原理是由单片机发出PWM(脉宽调制)信号来控制舵机运行。PWM信号的周期为20ms,基准脉j中宽度为1500“s,实际脉;中宽度范围为500—2500Us。如果是180。舵机,PWM信号脉>中宽度的范围就对应舵机的转角范围从-906到+90',如果是360。旋转舵机,则对应着舵机的转速和转向,脉宽为500 us,对应舵机以最高速度反转,脉宽为拨码开关与波特率设置2500us.对应舵机以最高速度正转,如果脉宽为基准脉宽1500Us,转速应该为零速。但是即使360。舵机是同一厂家、同一批次的产品,当单片机发出脉宽为1500u s的PWM信号时,舵机的转速也可能会偏离零速,所以我用PC机舵机控制软件来确定各个舵机应该发出脉宽为多少的PWM信号,才会使某一舵机的速度为零。
首先要对32路舵机控制板的跳线帽进行设置,还要安装控制板的USB驱动软件。
从机接收器上的32路舵机控制板各端口分布和功能如图8所示。
图8中标号为1、9、10、1 1的端口都可以供电,10号端口提供逻辑电源,ATMEGA328P-MU我用9V方块电池供电,12号端口提供舵机电源,我用乐高电池盒里的5节2400mAi]充电电池供电,1 1号“VL和VS1连通跳线帽”不插上,断开,逻辑电源与舵机电源分开供电,由于不用电脑USB供电,所以2号“USB供电选择跳线帽”也不插上,其他跳线帽都插上,蓝开模块插在1 6号“无线数传接口”上。
项目采用Arduino遥控器主机来控制舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心电机、齿轮与位置检测器构成。其工作原理是由单片机发出PWM(脉宽调制)信号来控制舵机运行。PWM信号的周期为20ms,基准脉j中宽度为1500“s,实际脉;中宽度范围为500—2500Us。如果是180。舵机,PWM信号脉>中宽度的范围就对应舵机的转角范围从-906到+90',如果是360。旋转舵机,则对应着舵机的转速和转向,脉宽为500 us,对应舵机以最高速度反转,脉宽为拨码开关与波特率设置2500us.对应舵机以最高速度正转,如果脉宽为基准脉宽1500Us,转速应该为零速。但是即使360。舵机是同一厂家、同一批次的产品,当单片机发出脉宽为1500u s的PWM信号时,舵机的转速也可能会偏离零速,所以我用PC机舵机控制软件来确定各个舵机应该发出脉宽为多少的PWM信号,才会使某一舵机的速度为零。
首先要对32路舵机控制板的跳线帽进行设置,还要安装控制板的USB驱动软件。
上一篇:蓝牙模块的功能和参数设置
上一篇:USB调试时的跳线帽和电源设置
 相关技术资料
相关技术资料- 11-1332路舵机控制板的电源供给和跳线帽设置
- 1-22电容器有什么特点
热门点击

 公网安备44030402000607
公网安备44030402000607





