
驱动板的原理分析
发布时间:2013/11/23 21:25:43 访问次数:7576
先来看看原理图。图8所示为底板及其驱动示意图,FM08A125V1A也就是实物的底板及其驱动电路的原理。大家看到的那些发光二极管代表了共阳极接点,但并不是真正的二极管点阵,之所以这样画是因为载在Proteus软件里找不到更好的表达方式了。希望大家切记,那不是真的灯珠,而是底面的共阳极接点(共有64个,每个面8个阳极、8个阴极)。
至于单片机,我这次用的是STC1 2C5A60S2(见图10),并非因为89C52速度不行,而是储存空间不够大;我手里60KB的单片机只有这么一块,所以就用上了。大家不要担心普通51单片机的能力问题,非增强型的单片机是完全可以胜任这个程序的,我亲自测试过,保证通过。

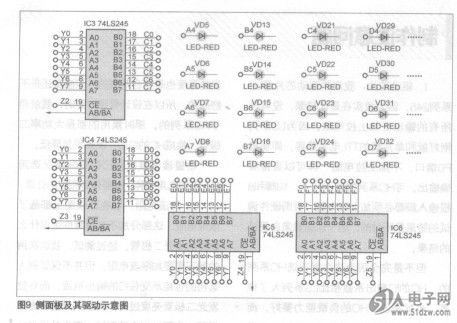
图9所示就是侧面板和驱动的电路示意图,和底板图一样,二极管并不是代表点阵,而是代表了侧面板的64个共阴极接点,侧面74LS245的输出全部连接的是侧面板的共阴极。
请大家注意图8和图9的1 9脚,是两两一组的,大家在焊接的时候也要注意到这部分的布局,否则以后组装的时候还是很麻烦的。
我没有画出灯珠的电路图,这部分其实就是8个独立的8x8点阵,我强调独图8底板及其驱动示意图立是因为这次的设计是不同于其他设计的。下面,我就详细说一下驱动原理和设计思路。
虽然原理上和大家平时接触的可能不一样,但是控制方案都是一样的,即先选中第一个面,显示图案后再选中第二个面。以此类推,类似于8位数码管控制,只不过,每个画是动态扫描程序,实际的程序代码会比控制8iv数码管的复杂许多。
我最开始看到的原理图是一位美国网友发布的资料,本来我也想遵循他的设计思路,即只用8个驱动IC,每个面的选通
用三极管。这样确实节约了IC和硬件,但在编程上就不那么简单了。因为国内大多数初学者都是用51单片机控制,即便是用C语言编写立方体的控制程序,也是需要比较复杂的算法的,我不想让程序作为单片机爱好者的瓶颈。下面,就根据我个坐标系的3种情况,作为六面体来说,就只有这3种情况。
这样,调用不同的子程序,就可以把坐标系切换到不同的单片机输出端口上去,而以往的设计是需要比较复杂的算法或者上位机弥补的。
当然,对立体几何很有心得的人可以不借助程序,仅利用大脑的想象就可以在固定坐标系里设计动画,不过,这种人是极少数的。或许,通过这一点,立方体在不久的将来可以应用到几何教学中去,锻炼人的立体感。
虽然这次程序我没有设计出坐标轴的切换程序,但就原理来说,只要明白立方体的控制方案,这2点并不难实现。如果对动画效果要求不高,可以跳过这部分。
先来看看原理图。图8所示为底板及其驱动示意图,FM08A125V1A也就是实物的底板及其驱动电路的原理。大家看到的那些发光二极管代表了共阳极接点,但并不是真正的二极管点阵,之所以这样画是因为载在Proteus软件里找不到更好的表达方式了。希望大家切记,那不是真的灯珠,而是底面的共阳极接点(共有64个,每个面8个阳极、8个阴极)。
至于单片机,我这次用的是STC1 2C5A60S2(见图10),并非因为89C52速度不行,而是储存空间不够大;我手里60KB的单片机只有这么一块,所以就用上了。大家不要担心普通51单片机的能力问题,非增强型的单片机是完全可以胜任这个程序的,我亲自测试过,保证通过。
图9所示就是侧面板和驱动的电路示意图,和底板图一样,二极管并不是代表点阵,而是代表了侧面板的64个共阴极接点,侧面74LS245的输出全部连接的是侧面板的共阴极。
请大家注意图8和图9的1 9脚,是两两一组的,大家在焊接的时候也要注意到这部分的布局,否则以后组装的时候还是很麻烦的。
我没有画出灯珠的电路图,这部分其实就是8个独立的8x8点阵,我强调独图8底板及其驱动示意图立是因为这次的设计是不同于其他设计的。下面,我就详细说一下驱动原理和设计思路。
虽然原理上和大家平时接触的可能不一样,但是控制方案都是一样的,即先选中第一个面,显示图案后再选中第二个面。以此类推,类似于8位数码管控制,只不过,每个画是动态扫描程序,实际的程序代码会比控制8iv数码管的复杂许多。
我最开始看到的原理图是一位美国网友发布的资料,本来我也想遵循他的设计思路,即只用8个驱动IC,每个面的选通
用三极管。这样确实节约了IC和硬件,但在编程上就不那么简单了。因为国内大多数初学者都是用51单片机控制,即便是用C语言编写立方体的控制程序,也是需要比较复杂的算法的,我不想让程序作为单片机爱好者的瓶颈。下面,就根据我个坐标系的3种情况,作为六面体来说,就只有这3种情况。
这样,调用不同的子程序,就可以把坐标系切换到不同的单片机输出端口上去,而以往的设计是需要比较复杂的算法或者上位机弥补的。
当然,对立体几何很有心得的人可以不借助程序,仅利用大脑的想象就可以在固定坐标系里设计动画,不过,这种人是极少数的。或许,通过这一点,立方体在不久的将来可以应用到几何教学中去,锻炼人的立体感。
虽然这次程序我没有设计出坐标轴的切换程序,但就原理来说,只要明白立方体的控制方案,这2点并不难实现。如果对动画效果要求不高,可以跳过这部分。
 相关技术资料
相关技术资料- 11-23驱动板的原理分析
- 相关IC型号
- FM08A125V1A
- FM0801-A1

 公网安备44030402000607
公网安备44030402000607





