
转子每个齿由一个凸极移到相邻的凸极需要前进两步
发布时间:2022/10/19 12:58:05 访问次数:163
转子的导条与端环采用高电阻率材料(如青铜)制成,这样是为了增大转子电阻,让控制绕组失电后,转子能马上停止运转。杯形转子交流伺服电动机的结构。这种交流伺服电动机有内、外两个定子。
外定子与一般交流电动机的定子相同,并绕有定子绕组;内定子是由硅钢片叠成的圆柱体.上面没有绕组,只是代替转子铁芯作为磁路的一部分。在内、外定子之闸,有一个薄而细长的空工作原理.
步进电动机种类很多,根据运转方式可分为旋转式、直线式和平面式,其中旋转式的应用最为广泛。
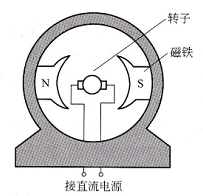
旋转式步进电动机又分为永磁式和反应式,永磁式步进电动机的转子采用永久磁铁制成,反应式步进电动机的转子采用软磁性材料制成。

由于反应式步进电动机具有反应快、惯性小和速度高等优点,因此应用很广泛。
反应式步进电动机是一个三相六极反应式步进电动机,它主要由凸极式定子、定子绕组和带有1个齿的转子组成。
反应式步进电动机工作原理分析如下。
步进电动机为三相单=拍反应式步进电动机,其中“=相”是指定子绕组为三相,“单”是指每次只有一相绕组通电.“三拍”是指在一个通电循环周期内绕组有3次供电切换。
步进电动机的定子绕组每切换一相电源.转子就会旋转一定的角度,该角度称为步距角。

步进电动机定子圆周上平均分布着6个凸极,任意两个凸极之问的角度为60°,转子每个齿由一个凸极移到相邻的凸极需要前进两步,因此该转子的步距角为30°。步进电动机的步距角可以用下面的公式计算
k=360°/(zN)
式中,z为转子的齿数;N为一个通电循环周期的拍数。
当A相定子绕组通电时,绕组产生磁场,由于磁场磁感线力图通过磁阻最小的路径,在磁场的作用下,转子旋转使齿1、3分别正对A、A′极。
当B,C相定子绕组同时通电时,绕组产生磁场.在绕组磁场作用下,转子旋转使齿3、1分别向C、C′极靠近。
当C相定子绕组通电时,绕组产生磁场,在绕组磁场的作用下,转子旋转使齿3、1分别正对C、C′极。
转子的导条与端环采用高电阻率材料(如青铜)制成,这样是为了增大转子电阻,让控制绕组失电后,转子能马上停止运转。杯形转子交流伺服电动机的结构。这种交流伺服电动机有内、外两个定子。
外定子与一般交流电动机的定子相同,并绕有定子绕组;内定子是由硅钢片叠成的圆柱体.上面没有绕组,只是代替转子铁芯作为磁路的一部分。在内、外定子之闸,有一个薄而细长的空工作原理.
步进电动机种类很多,根据运转方式可分为旋转式、直线式和平面式,其中旋转式的应用最为广泛。
旋转式步进电动机又分为永磁式和反应式,永磁式步进电动机的转子采用永久磁铁制成,反应式步进电动机的转子采用软磁性材料制成。
由于反应式步进电动机具有反应快、惯性小和速度高等优点,因此应用很广泛。
反应式步进电动机是一个三相六极反应式步进电动机,它主要由凸极式定子、定子绕组和带有1个齿的转子组成。
反应式步进电动机工作原理分析如下。
步进电动机为三相单=拍反应式步进电动机,其中“=相”是指定子绕组为三相,“单”是指每次只有一相绕组通电.“三拍”是指在一个通电循环周期内绕组有3次供电切换。
步进电动机的定子绕组每切换一相电源.转子就会旋转一定的角度,该角度称为步距角。
步进电动机定子圆周上平均分布着6个凸极,任意两个凸极之问的角度为60°,转子每个齿由一个凸极移到相邻的凸极需要前进两步,因此该转子的步距角为30°。步进电动机的步距角可以用下面的公式计算
k=360°/(zN)
式中,z为转子的齿数;N为一个通电循环周期的拍数。
当A相定子绕组通电时,绕组产生磁场,由于磁场磁感线力图通过磁阻最小的路径,在磁场的作用下,转子旋转使齿1、3分别正对A、A′极。
当B,C相定子绕组同时通电时,绕组产生磁场.在绕组磁场作用下,转子旋转使齿3、1分别向C、C′极靠近。
当C相定子绕组通电时,绕组产生磁场,在绕组磁场的作用下,转子旋转使齿3、1分别正对C、C′极。
 相关技术资料
相关技术资料- 8-4100V高频半桥N-沟道功率MOSFET驱动器
- 8-4集成高端和低端 FET 和驱动器特性和优势
- 8-4栅极驱动单片半桥芯片MP86945A
- 8-4数字恒定导通时间控制模式(COT)应用探究
- 8-4高效率 (CSP/QFN/BGA/LGA) 电源管理产品系列
- 8-4 IC 工艺、封装技术、单片设计和系统专业技术详解
- 8-2电源管理 IC (PMIC)MPQ70160FS-A
- 8-2I2C 接口和 PmBUS 以及 OTP/MTP 存储器
- 8-2 MOSFET 和栅极驱动器单片半桥芯片
- 8-2数字恒定导通时间控制模式(COT)应用详解
- 8-2Power Management Buck/降压转换器
- 8-2反激变换器传导和辐射电磁干扰分析和抑制技术

 公网安备44030402000607
公网安备44030402000607





