
XC4010XLPQ208��·�������ȶ�����
����ʱ��:2019/11/12 17:38:37 ���ʴ���:1123
XC4010XLPQ208���ҽϺ��ʡ�ʱ������Ĺ۲�ʱ��ҲӦ�Գ�,��·������Լ��30ms,�۲�ʱ��Ӧ���ڴ�ֵ,��ȡ50ms������,����г��ʧ��ʱ,Ӧȡ���ȶ�������100���������ϵIJ������ݡ�)
��:����ʱ�����,����ʾ�������������÷�����������������������ͼ9.9.2��ʾ,��ͼb��������Ϊr=1.o64 17ms,����Ƶ��fo=1/r��94oHz,������ֵ�����
��ʱ����������ø���Ҷ����,��������Ƶ��Ϊ940 Hz,������10��г���������õ����½��:
DC COMPoNENT=-2.599673E-04
HARMoNIC FREQUENCY FOURIER NORMALIZED PHASE NOR��MALIZED
No(Hz) COMPoNENT COMPONENT (DEG) PHASE (DEG)
1 9.400E+02 9.404E+00 1.000E+00 1.698E+02 0.000IE+00
2 1.880E4+03 3.156E-03 3.356E-04 -1.550E+02 -4.945E+02
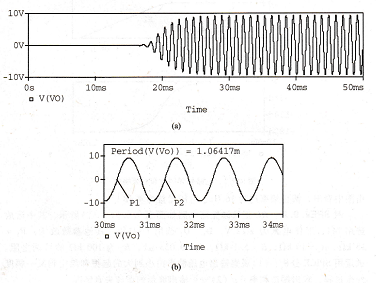
ͼ9.9.2 ��SPE9,9.2�ķ�����,(a)��·�������ȶ����� (b)���ξֲ�
���С,�Ӷ����������β������ɻ����ȶ��ԺͲ������½�,ʹ�ɻ����Ա��������ķ��С���Էɻ��ķ����Ǻ�Σ�յġ�����ӭ�ǹ�����ɵķɻ�ʧ��Ҳ������ӭ��ʧ��,���κο��ٺͷ�����̬��,ֻҪӭ�dz����ɻ����ٽ�ӭ�Ƕ����ܷ���ʧ�١��ɻ����ٽ�ӭ��һ��Ϊ16�����ҡ�ͨ���ڷ����в���ﵽ�������ϵ�����ٽ�ӭ�ǵķ���״̬,��Ϊ�ڵ������״̬֮ǰ,���ڸ����������������,�Ѿ����������ȶ��Ա仵��ʧ������Ϊ�˱�֤���а�ȫ,��ֹ�ɻ�ʧ��9�涨��һ��С���������ϵ��������ϵ��ֵ��һ��С���ٽ�ӭ�ǵ�ӭ��ֵ,������ֵ���ڷ����п��Դﵽ�����ܳ����İ�ȫֵ��
�ɻ���ʧ���ٶȣ��ɻ�ӭ�Ǹմﵽ�ٽ�ӭ��ʱ�ķ����ٶȾͽ���ʧ���ٶȡ���ʽ(2-5)L=CL*1/2PU2*S���Եó�U=(2L/(CL*p*s))1/2�����ɻ����ٽ�ӭ�Ƿ���ʱ,����ϵ����LӦ�õ����������ϵ��CLmax,�ɴ˵ó�:
Us=(2L(CLMax(p*s))1/2
ʽ��:usһ�ɻ�ʧ���ٶȡ�
���ɻ�ƽ��ʱ,�ɻ����������ڷɻ�����������L=W����,�ɻ�ƽ��ʱ��ʧ���ٶ�Ϊ:
US=(2L/(��Lmax*p*S))]1/2
�������ķ���״̬��,�ɻ��������������ڷɻ�����,���ǵ��ڷɻ���������һ��ϵ��ny�����ϵ�������غ�ϵ����
ny=L/w
ʽ��:ny-�غ�ϵ��;
lһ�ɻ�������;
Wһ�ɻ���������
����,�������ķ���״̬,�ɻ���ʧ���ٶȾ͵���:
us=ny1/2*usƽ
�ɻ���������,�ɻ���ʧ���ٶ�Ҳ�����ӡ���ͬ���ķ���״̬��, �ɻ���������,
����Ҫ������Ҳ��������,���ɻ��������ϵ���������䡢ֻ����߷����ٶ��������ηɻ���ʧ���ٶ�Ҳ�������ˡ�
�ɻ������½������,ʹ������װ�ÿ�������������ϵ��,�Ӷ����ͷɻ���ʧ���ٶ�,ʹ�ɻ������Ը��͵��ٶ���ɺ���½��
�ڸ��ֲ�ͬ�ķ���״̬��,�ɻ���ʧ���ٶȵ��ڷɻ�ƽ��ʧ���ٶȳ���ny1/2,�ú�ϵ��Խ��,��Ӧ��ʧ���ٶ�Ҳ��Խ��
2.351 El-01 2.500El-02 1.007E.+02 -4.086E.+02
8.899E-04 9.462E-05 -1.428E+02 -8.219E+02
8.613E-02 9.159E-03 9,006E+��01 -7.587E+02
1.073E-03 1.141E-04 -1.317E.+02 -1,150EI+03
4,378E-02 4.655E-03 7.372E+01 -1,115E+03
2.155 EI-03 2.291E.-04 -9.544EI+01 -1.454E)+03
2.323E-02 2.470E-03 5.426E+01 -1,474E+03
4.919E-03 5.231E-04 -3.861E+01 -1.736E����03
ToTAL HARMONIC DISTORTION=2.714702E+00 PERCENT
�ɴ˿���,��������Ϊ9.404��,3�κ�5��г��������������г������,�ֱ�Ϊ0.2351V��0,08613V����г��ʧ��ϵ��ԼΪ2.71%��
J��Դ�˲���·ͨ�������˷ź�RC���繹�ɵĵ���ϵͳ,���ݷ�Ƶ��Ӧ��ͬ,�ɷ�Ϊ��ͨ����ͨ����ͨ�������ȫͨ�˲���·���߽��˲���·һ�㶼����һ�Ͷ�����Դ�˲���·���,�������˲���·���ݺ����Ļ�����ʽ��һ�µ�(����9.9.1,���Ц�cΪ3 dB��ֹ��Ƶ��,��0Ϊ���Ľ�Ƶ��),��������ڷ�����s�Ľ״�Ϊ0��1��2������ϡ�
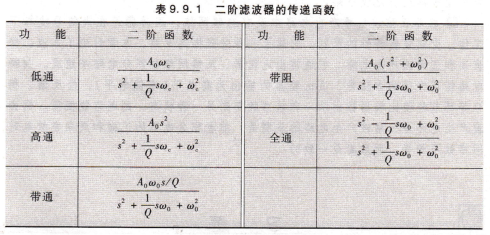
��9.9,1 �����˲����Ĵ��ݺ���
���ص����˲�����һ�ֽ��µ��˲���·,�侫�Ⱥ��ȶ��Ծ��ϸ�,Ŀǰ���ж��ּ��ɵ�·����,���˹���Ƶ�ʻ���������,��ָ���Ѵﵽʵ��ˮƽ��
XC4010XLPQ208���ҽϺ��ʡ�ʱ������Ĺ۲�ʱ��ҲӦ�Գ�,��·������Լ��30ms,�۲�ʱ��Ӧ���ڴ�ֵ,��ȡ50ms������,����г��ʧ��ʱ,Ӧȡ���ȶ�������100���������ϵIJ������ݡ�)
��:����ʱ�����,����ʾ�������������÷�����������������������ͼ9.9.2��ʾ,��ͼb��������Ϊr=1.o64 17ms,����Ƶ��fo=1/r��94oHz,������ֵ�����
��ʱ����������ø���Ҷ����,��������Ƶ��Ϊ940 Hz,������10��г���������õ����½��:
DC COMPoNENT=-2.599673E-04
HARMoNIC FREQUENCY FOURIER NORMALIZED PHASE NOR��MALIZED
No(Hz) COMPoNENT COMPONENT (DEG) PHASE (DEG)
1 9.400E+02 9.404E+00 1.000E+00 1.698E+02 0.000IE+00
2 1.880E4+03 3.156E-03 3.356E-04 -1.550E+02 -4.945E+02
ͼ9.9.2 ��SPE9,9.2�ķ�����,(a)��·�������ȶ����� (b)���ξֲ�
���С,�Ӷ����������β������ɻ����ȶ��ԺͲ������½�,ʹ�ɻ����Ա��������ķ��С���Էɻ��ķ����Ǻ�Σ�յġ�����ӭ�ǹ�����ɵķɻ�ʧ��Ҳ������ӭ��ʧ��,���κο��ٺͷ�����̬��,ֻҪӭ�dz����ɻ����ٽ�ӭ�Ƕ����ܷ���ʧ�١��ɻ����ٽ�ӭ��һ��Ϊ16�����ҡ�ͨ���ڷ����в���ﵽ�������ϵ�����ٽ�ӭ�ǵķ���״̬,��Ϊ�ڵ������״̬֮ǰ,���ڸ����������������,�Ѿ����������ȶ��Ա仵��ʧ������Ϊ�˱�֤���а�ȫ,��ֹ�ɻ�ʧ��9�涨��һ��С���������ϵ��������ϵ��ֵ��һ��С���ٽ�ӭ�ǵ�ӭ��ֵ,������ֵ���ڷ����п��Դﵽ�����ܳ����İ�ȫֵ��
�ɻ���ʧ���ٶȣ��ɻ�ӭ�Ǹմﵽ�ٽ�ӭ��ʱ�ķ����ٶȾͽ���ʧ���ٶȡ���ʽ(2-5)L=CL*1/2PU2*S���Եó�U=(2L/(CL*p*s))1/2�����ɻ����ٽ�ӭ�Ƿ���ʱ,����ϵ����LӦ�õ����������ϵ��CLmax,�ɴ˵ó�:
Us=(2L(CLMax(p*s))1/2
ʽ��:usһ�ɻ�ʧ���ٶȡ�
���ɻ�ƽ��ʱ,�ɻ����������ڷɻ�����������L=W����,�ɻ�ƽ��ʱ��ʧ���ٶ�Ϊ:
US=(2L/(��Lmax*p*S))]1/2
�������ķ���״̬��,�ɻ��������������ڷɻ�����,���ǵ��ڷɻ���������һ��ϵ��ny�����ϵ�������غ�ϵ����
ny=L/w
ʽ��:ny-�غ�ϵ��;
lһ�ɻ�������;
Wһ�ɻ���������
����,�������ķ���״̬,�ɻ���ʧ���ٶȾ͵���:
us=ny1/2*usƽ
�ɻ���������,�ɻ���ʧ���ٶ�Ҳ�����ӡ���ͬ���ķ���״̬��, �ɻ���������,
����Ҫ������Ҳ��������,���ɻ��������ϵ���������䡢ֻ����߷����ٶ��������ηɻ���ʧ���ٶ�Ҳ�������ˡ�
�ɻ������½������,ʹ������װ�ÿ�������������ϵ��,�Ӷ����ͷɻ���ʧ���ٶ�,ʹ�ɻ������Ը��͵��ٶ���ɺ���½��
�ڸ��ֲ�ͬ�ķ���״̬��,�ɻ���ʧ���ٶȵ��ڷɻ�ƽ��ʧ���ٶȳ���ny1/2,�ú�ϵ��Խ��,��Ӧ��ʧ���ٶ�Ҳ��Խ��
2.351 El-01 2.500El-02 1.007E.+02 -4.086E.+02
8.899E-04 9.462E-05 -1.428E+02 -8.219E+02
8.613E-02 9.159E-03 9,006E+��01 -7.587E+02
1.073E-03 1.141E-04 -1.317E.+02 -1,150EI+03
4,378E-02 4.655E-03 7.372E+01 -1,115E+03
2.155 EI-03 2.291E.-04 -9.544EI+01 -1.454E)+03
2.323E-02 2.470E-03 5.426E+01 -1,474E+03
4.919E-03 5.231E-04 -3.861E+01 -1.736E����03
ToTAL HARMONIC DISTORTION=2.714702E+00 PERCENT
�ɴ˿���,��������Ϊ9.404��,3�κ�5��г��������������г������,�ֱ�Ϊ0.2351V��0,08613V����г��ʧ��ϵ��ԼΪ2.71%��
J��Դ�˲���·ͨ�������˷ź�RC���繹�ɵĵ���ϵͳ,���ݷ�Ƶ��Ӧ��ͬ,�ɷ�Ϊ��ͨ����ͨ����ͨ�������ȫͨ�˲���·���߽��˲���·һ�㶼����һ�Ͷ�����Դ�˲���·���,�������˲���·���ݺ����Ļ�����ʽ��һ�µ�(����9.9.1,���Ц�cΪ3 dB��ֹ��Ƶ��,��0Ϊ���Ľ�Ƶ��),��������ڷ�����s�Ľ״�Ϊ0��1��2������ϡ�
��9.9,1 �����˲����Ĵ��ݺ���
���ص����˲�����һ�ֽ��µ��˲���·,�侫�Ⱥ��ȶ��Ծ��ϸ�,Ŀǰ���ж��ּ��ɵ�·����,���˹���Ƶ�ʻ���������,��ָ���Ѵﵽʵ��ˮƽ��
��һƪ��TPS51217DSCT��ݲ���ѹ������·
��һƪ��M34116B1������ѹ�Ƚ���
 ��ؼ�������
��ؼ�������- 8-724λ���ཻ��/ֱ�����ʼ��IC
- 8-7���ɵ���������IC���¶ȴ�����Ӧ�ü���
- 8-7������������PTC����������
- 8-7PIC32CM5164JH01048 ������
- 8-7512 KB�����64 KB��̬�����ȡ�洢��
- 8-7PIC32CM JHϵ����������MCU��Ӧ�����
- 8-6���½ṹ�����ǻ��ϼ��ɹ�ԴоƬ
- 8-6ȫ��˼ܹ� X930 ����˵�ȫ��� CPU ����
- 8-6������ϵͳ��Compute Sub Systems��CSS��
- 8-6Neoverse CSS V3 �ܹ�AI CPU C
- 8-6Arm Neoverse CPU��������оƬ
- 8-6Dimensity 9400оƬӦ��̽��
�������
- DRS61-A1A08192 D�������Ķ�̬
- HMC318MS8GETR��Դ��NMOs��
- VI-B1H-CV��������Ĺ�ģ��ѹ����
- NS4215 3�߱�������Ӧ��
- MP2482DN-LF-Z������ʱ���ϵ�·
- TL372I�߶���ʾ�����·
- ZMM4.7V/4.7V MOSFET�����
- FT121Q ��λB4B3��4��״̬�����
- ZL50022�����źŵ�ѹ�ı仯
- M41256A-12�������ȵ���ЧӦ
�Ƽ���������

- �й���ý��ѧ��ý����ݿ�
- ��ý����ݿ�����ʽ¡ͯ���С�������i���ҹ���ֵܾȲ���... [��ϸ]
- 24λ���ཻ��/ֱ�����ʼ��IC
- ���ɵ���������IC���¶ȴ�����
- ������������PTC����������
- PIC32CM5164JH01048 ����
- 512 KB�����64 KB��̬�����ȡ�洢
- PIC32CM JHϵ������
- ��ý��Э������SM501��Ƕ��ʽϵͳ�е�Ӧ��
- ����IEEE802.11b��EPA�¶ȱ�����
- QUICCEngine�������ƶ�IP�������
- SoC���������IJ�ҵ����
- MPC8xxϵ�д�������Ƕ��ʽϵͳ��Դ���
- dsPIC�����ڽ�����Ƶ�����е�Ӧ���о�
 ��������44030402000607
��������44030402000607





