
ZGP323LEH4816G��ͬ�����Ĺ���
����ʱ��:2019/11/4 8:43:42 ���ʴ���:1173
ZGP323LEH4816G��������ʽλ�ƴ���������������������״���������Լ���λ����,�����ֻ���������λ�ơ������Լ���������ϵ���ȡ�����λ�Ʒ�Χ���Դ�0~1mm��0~500 mm,�ֱ��ʿ��������Χ��0.1%��
��ͬ������ͬ����,��ͬ������ͬ���������ڲ�����λ�Ƶı�ѹ��ʽ��������
��ͬ����,��ͬ�����Ĺ����빤��ԭ��,��ͬ�����DZ��������ת��ѹ�����ļ���ͬ�����Ľṹʾ��ͼ��ͼ9-52(a)��ʾ��
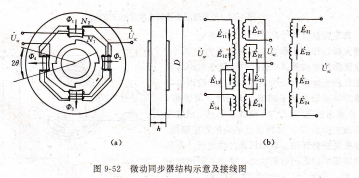
�����ĸ����Ķ��Ӻ�һ������������������״��ת����ɡ��ڶ����ĸ����ϵ���ֻ������ͬ����Ȧ���ӳɳ�������,������ֻ������ͬ����Ȧ���ӳɴμ����顣��Ȧ�Ĵ��ӷ�����ͼ9-52(b)��ʾ��
��ͬ�����ṹʾ�⼰����ͼ,�ٶ������ĸ����ϵij������鵥����Ȧ������1��ʾ,�μ����鵥����Ȧ������2��ʾ�����������鼤��ʱ,�ڸ������ϲ����Ĵ�ͨΪ��1����2����3����4����1��3��2��4����Դż���,��ͨ������һ�µ�,ͼ9-52�м�ͷ�����ʾ��Щ��ͨ��ijһ˲ʱ��������ת��ת��ʱ,����ı仯������μ������и����綯�Ƶı仯���ĶԳ��μ���Ȧ�������ĸ���ѹ����
�ڳ�ʼλ�æ�=0��ʱ,ת�ӵ�ÿ��������ס�˶��Ӽ���һ�롣��ʱ,�ĸ����Ӽ��Ĵ�·���Գ�,���,ͨ�������ĸ����Ĵ�ͨ��С�����,����l=��2=��3=��4�������ĸ��μ���Ȧ�и������ƶ����,�����ڴμ���Ȧ1��3��2��4����,��������ѹΪ�㡣
��ת��˳ʱ��ת��һ���Ƕ�+��ʱ,2��4������Ը����������,��1��3������Ը��������С�����2��4�������С��ͨ����,�μ���Ȧ2��4�����綯������;�෴,1��3�����������ͨ��С,�μ���Ȧ1��3��Ӧ���Ƽ�С�����,�ܵ������ѹ����Ϊ��,������ѹ��2��4��Ȧ�и�Ӧ����ͬ��,����˳ʱ��ת�Ǧ������ȡ�
��ת�ӷ�ʱ��ת��һ���ǶȨD��ʱ,�����ǰ���෴,��Ȧ1��3�ĸ����綯�Ʊ���Ȧ4�и����綯�ƴ����,�����ѹ��˳ʱ�������λ�෴,���СҲ��ת�Ǧ������ȡ�
ͬ���������ѹ��һ��������,ͨ��������ѹΪ5~50V,����Ƶ��Ϊ60~50 kHz��ͬ�����������ȴ�ԼΪÿ��0.2~5V,��λ����Ϊ��7��~��10��,����Ϊ0.05%~10%��
ͬ�����ڷɻ���Ӧ�þ���,�ڶԷɻ��ķ��н����Զ�����ʱ,��Ҫ��һ����������źŵĸ߶ȴ����������ִ�����ʵ������һ��ʹ��ͬ�������涯ϵͳ,��ԭ����ͼʾ��ͼ9-53��
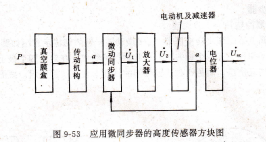
Ӧ��ͬ�����ĸ߶ȴ���������ͼ���Ĥ���Ǹ��ܸ߶ȱ仯������Ԫ������
������ʱ,������Ĥ���ϵĴ���ѹ��P��С,Ĥ�����Ͳ���λ��a,ͨ������������С�������������Ѵ�λ�Ʊ�Ϊת�Ǧ���С����ת�����ļ�ͬ������ת��ͬ�ᡣ����ת��Ҳת������,ʹ����ĵ�ѹ������dz����ȡ�J1ͨ�����������Ŵ�Ϊ��,�ӵ�ִ�е綯���Ŀ�����,�綯���㿪ʼת�����綯��ͨ��������һ����
�������ε�λ���ĵ�ˢת��,ʹ֮�������ѹôc,��һ����,�ַ������ļ�ͬ����,ʹ������ͬһ����ת������,��ͬ���������弴���ڴˡ������絹����ͼ
�Ӷ�,ͬ�����ִ���ƽ��λ��,��ϵͳ�;�ֹ������
ͬ����Ҳ��һ�ֿ���Ȧ�以�еı仯�ﵽ������λ��Ŀ�ĵ�һ����ת��ѹ��ʽ��������������Ϊ��������ĵ���ת�Ӻ���Ϊ�μ���������ඨ������ɡ��ṹʾ��ͼ��ͼ9-54��ʾ��
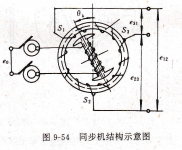
�����������μ���Ȧ���ȷֲ�,ÿ����Ȧ��ռ����Ϊ120��,�������νӷ����ӡ�
�����н���������ѹ��ת����Ȧ��ת��ת����,���ı���μ�����Ȧ��Ļ���,���,ÿ����Ȧ����������Ӧ�ĸ����綯��,���Ƿֱ�Ϊ
e12=eOsinqk=Emsinqksin��0t
e23=eOsin(qk+120��)=Emsin(qk+120��)sin�ء� (9-22)
��31=eOsin(qk+240��)=Emsin(��+240��)sin��ot
ʽ�� eo�D������ѹ;
��λ����ͬ�����Ŵ���,���Ĥ����������.
ZGP323LEH4816G��������ʽλ�ƴ���������������������״���������Լ���λ����,�����ֻ���������λ�ơ������Լ���������ϵ���ȡ�����λ�Ʒ�Χ���Դ�0~1mm��0~500 mm,�ֱ��ʿ��������Χ��0.1%��
��ͬ������ͬ����,��ͬ������ͬ���������ڲ�����λ�Ƶı�ѹ��ʽ��������
��ͬ����,��ͬ�����Ĺ����빤��ԭ��,��ͬ�����DZ��������ת��ѹ�����ļ���ͬ�����Ľṹʾ��ͼ��ͼ9-52(a)��ʾ��
�����ĸ����Ķ��Ӻ�һ������������������״��ת����ɡ��ڶ����ĸ����ϵ���ֻ������ͬ����Ȧ���ӳɳ�������,������ֻ������ͬ����Ȧ���ӳɴμ����顣��Ȧ�Ĵ��ӷ�����ͼ9-52(b)��ʾ��
��ͬ�����ṹʾ�⼰����ͼ,�ٶ������ĸ����ϵij������鵥����Ȧ������1��ʾ,�μ����鵥����Ȧ������2��ʾ�����������鼤��ʱ,�ڸ������ϲ����Ĵ�ͨΪ��1����2����3����4����1��3��2��4����Դż���,��ͨ������һ�µ�,ͼ9-52�м�ͷ�����ʾ��Щ��ͨ��ijһ˲ʱ��������ת��ת��ʱ,����ı仯������μ������и����綯�Ƶı仯���ĶԳ��μ���Ȧ�������ĸ���ѹ����
�ڳ�ʼλ�æ�=0��ʱ,ת�ӵ�ÿ��������ס�˶��Ӽ���һ�롣��ʱ,�ĸ����Ӽ��Ĵ�·���Գ�,���,ͨ�������ĸ����Ĵ�ͨ��С�����,����l=��2=��3=��4�������ĸ��μ���Ȧ�и������ƶ����,�����ڴμ���Ȧ1��3��2��4����,��������ѹΪ�㡣
��ת��˳ʱ��ת��һ���Ƕ�+��ʱ,2��4������Ը����������,��1��3������Ը��������С�����2��4�������С��ͨ����,�μ���Ȧ2��4�����綯������;�෴,1��3�����������ͨ��С,�μ���Ȧ1��3��Ӧ���Ƽ�С�����,�ܵ������ѹ����Ϊ��,������ѹ��2��4��Ȧ�и�Ӧ����ͬ��,����˳ʱ��ת�Ǧ������ȡ�
��ת�ӷ�ʱ��ת��һ���ǶȨD��ʱ,�����ǰ���෴,��Ȧ1��3�ĸ����綯�Ʊ���Ȧ4�и����綯�ƴ����,�����ѹ��˳ʱ�������λ�෴,���СҲ��ת�Ǧ������ȡ�
ͬ���������ѹ��һ��������,ͨ��������ѹΪ5~50V,����Ƶ��Ϊ60~50 kHz��ͬ�����������ȴ�ԼΪÿ��0.2~5V,��λ����Ϊ��7��~��10��,����Ϊ0.05%~10%��
ͬ�����ڷɻ���Ӧ�þ���,�ڶԷɻ��ķ��н����Զ�����ʱ,��Ҫ��һ����������źŵĸ߶ȴ����������ִ�����ʵ������һ��ʹ��ͬ�������涯ϵͳ,��ԭ����ͼʾ��ͼ9-53��
Ӧ��ͬ�����ĸ߶ȴ���������ͼ���Ĥ���Ǹ��ܸ߶ȱ仯������Ԫ������
������ʱ,������Ĥ���ϵĴ���ѹ��P��С,Ĥ�����Ͳ���λ��a,ͨ������������С�������������Ѵ�λ�Ʊ�Ϊת�Ǧ���С����ת�����ļ�ͬ������ת��ͬ�ᡣ����ת��Ҳת������,ʹ����ĵ�ѹ������dz����ȡ�J1ͨ�����������Ŵ�Ϊ��,�ӵ�ִ�е綯���Ŀ�����,�綯���㿪ʼת�����綯��ͨ��������һ����
�������ε�λ���ĵ�ˢת��,ʹ֮�������ѹôc,��һ����,�ַ������ļ�ͬ����,ʹ������ͬһ����ת������,��ͬ���������弴���ڴˡ������絹����ͼ
�Ӷ�,ͬ�����ִ���ƽ��λ��,��ϵͳ�;�ֹ������
ͬ����Ҳ��һ�ֿ���Ȧ�以�еı仯�ﵽ������λ��Ŀ�ĵ�һ����ת��ѹ��ʽ��������������Ϊ��������ĵ���ת�Ӻ���Ϊ�μ���������ඨ������ɡ��ṹʾ��ͼ��ͼ9-54��ʾ��
�����������μ���Ȧ���ȷֲ�,ÿ����Ȧ��ռ����Ϊ120��,�������νӷ����ӡ�
�����н���������ѹ��ת����Ȧ��ת��ת����,���ı���μ�����Ȧ��Ļ���,���,ÿ����Ȧ����������Ӧ�ĸ����綯��,���Ƿֱ�Ϊ
e12=eOsinqk=Emsinqksin��0t
e23=eOsin(qk+120��)=Emsin(qk+120��)sin�ء� (9-22)
��31=eOsin(qk+240��)=Emsin(��+240��)sin��ot
ʽ�� eo�D������ѹ;
��λ����ͬ�����Ŵ���,���Ĥ����������.
 ��ؼ�������
��ؼ�������- 8-22������ Balong 6000 5G ���ƽ����о
- 8-22�ڶ���4����ϵͳ��оƬ��SoC���ܹ�����ƽ̨
- 8-22���ɵ�ѹ���MOSFETӦ�����
- 8-22���ܶ�SiC/GaN����ת�������������
- 8-22����ѹ650V GaN FET��TP65H030G4PRS
- 8-22������ ��Module DC/DC ת���������������
- 8-21��һ����ƷRL78 ϵ��������Ӧ�ü���
- 8-21˫�˿ھ�̬�����ȡ�洢����SRAM��
- 8-21512kB �C 1MB ����� 256kB SRAMӦ��̽��
- 8-21480MHz Arm Cortex-M85ͼ��������
- 8-21 RGB �� MIPI-DSI �ӿ�RA8D1 MC
- 8-21RA ϵ�е�Arm ������ (MCU)
�������
- HMC318MS8GETR��Դ��NMOs��
- DRS61-A1A08192 D�������Ķ�̬
- NS4215 3�߱�������Ӧ��
- MP2482DN-LF-Z������ʱ���ϵ�·
- TL372I�߶���ʾ�����·
- ZMM4.7V/4.7V MOSFET�����
- FT121Q ��λB4B3��4��״̬�����
- ZL50022�����źŵ�ѹ�ı仯
- M41256A-12�������ȵ���ЧӦ
- RMCF0603JT7R50 ��������
�Ƽ���������

- �й���ý��ѧ��ý����ݿ�
- ��ý����ݿ�����ʽ¡ͯ���С�������i���ҹ���ֵܾȲ���... [��ϸ]
 ��������44030402000607
��������44030402000607





