
������Ȧ�ļ���Դ�Ի���
����ʱ��:2017/1/2 18:05:45 ���ʴ���:505
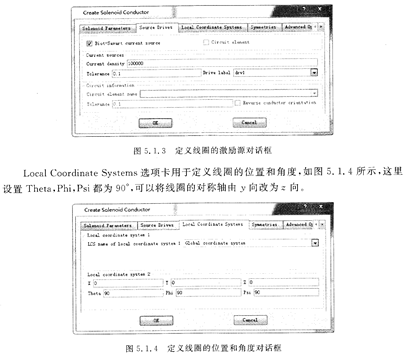
Source DHveѡ����ڶ�����Ȧ�ļ���Դ,��ͼ5.1.3��ʾ��opero3D����Ȧ�ļ���Դ������, HEF4050BTһ���Ǣ�ot Savart����Դ��ot Savart currellt sourCe,�������ֻ�趨����Ȧ����ĵ����ܶ�Currel1t density����;��һ���ǵ�·��ԪCircuit elemcnt,���������ʹ��Ȧ��Ϊ�Զ����·�е�һ������,��Ȧ����ͨ����·���塣����ELEKTRAʱ�䳡ģ��,���ַ�ʽ�����ԡ�������������Ȧ�����ı仯���û��Զ����,��������õ�·����,��ֱ����Biot Savart����Դ��⡣��ʱ,����Ҫָ��һ����������Drive labcl,���ں����������趨�����ܶ���ʱ��ı仯��
ͼ5.1,3 ������Ȧ�ļ���Դ�Ի���
Local Coordinate Systemsѡ����ڶ�����Ȧ��λ�úͽǶ�,��ͼ5.1.4��ʾ,��������Theta,Phi,Psi��Ϊ90��,���Խ���Ȧ�ĶԳ�����y���Ϊz��
Source DHveѡ����ڶ�����Ȧ�ļ���Դ,��ͼ5.1.3��ʾ��opero3D����Ȧ�ļ���Դ������, HEF4050BTһ���Ǣ�ot Savart����Դ��ot Savart currellt sourCe,�������ֻ�趨����Ȧ����ĵ����ܶ�Currel1t density����;��һ���ǵ�·��ԪCircuit elemcnt,���������ʹ��Ȧ��Ϊ�Զ����·�е�һ������,��Ȧ����ͨ����·���塣����ELEKTRAʱ�䳡ģ��,���ַ�ʽ�����ԡ�������������Ȧ�����ı仯���û��Զ����,��������õ�·����,��ֱ����Biot Savart����Դ��⡣��ʱ,����Ҫָ��һ����������Drive labcl,���ں����������趨�����ܶ���ʱ��ı仯��
ͼ5.1,3 ������Ȧ�ļ���Դ�Ի���
Local Coordinate Systemsѡ����ڶ�����Ȧ��λ�úͽǶ�,��ͼ5.1.4��ʾ,��������Theta,Phi,Psi��Ϊ90��,���Խ���Ȧ�ĶԳ�����y���Ϊz��
��һƪ���������Ŀ���ˮƽ�˶���Ϊ��
��һƪ���ݹ���Ȧ�����Ի���
 ��ؼ�������
��ؼ�������- 3-13��ֹ����ͨ���
- 1-2������Ȧ�ļ���Դ�Ի���
- 1-1ͨ�����������·�ƽ��п���
- 7-4���������
- 4-18��Դ�����˲���
�������
- ��������Ӧ�èD�D���������������ݷ�����
- ����TTL���缫��·��(OC��)�������ܼ�
- 8ѡ1����ѡ����74Ls151
- ��̬�����
- �������IJ�������
- ����������
- ��ų���������
- �뵼�����������PN��������ߺܿǹ��ɵ�
- dt-890������ʽ���ñ�
- �����Ƶ��Դǰ��������
�Ƽ���������

- ѭ�������ǻ��������ź�
- ѭ�������ǻ��������źͱ�����õĿ��Ʒ�ʽ��E48S... [��ϸ]
- 100V��Ƶ����N-��������MOSFET����
- ���ɸ߶˺͵Ͷ� FET ������
- դ��������Ƭ����оƬMP869
- ���ֺ㶨��ͨʱ�����ģʽ��COT��Ӧ��̽��
- ���� (CSP/QFN/BG
- IC ���ա���װ��������Ƭ��
- ��ý��Э������SM501��Ƕ��ʽϵͳ�е�Ӧ��
- ����IEEE802.11b��EPA�¶ȱ�����
- QUICCEngine�������ƶ�IP�������
- SoC���������IJ�ҵ����
- MPC8xxϵ�д�������Ƕ��ʽϵͳ��Դ���
- dsPIC�����ڽ�����Ƶ�����е�Ӧ���о�
 ��������44030402000607
��������44030402000607





