

使用并行接口驱动静态LCD
发布时间:2016/10/17 19:29:45 访问次数:484
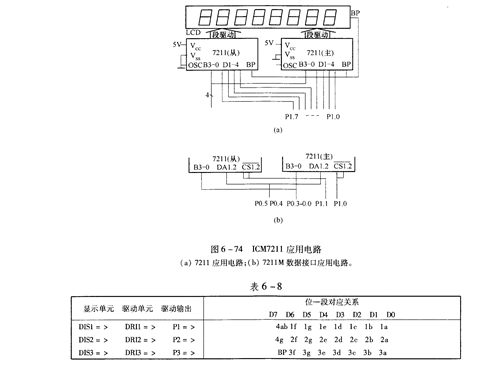
①硬件构成:用盯51的并口P1,”,P~s实现LCD的静态驱动,如图6-74所示。
②驱动要求:显示位的状态与BP不在同一状态,即当BP=1时,显示数据为“0”,当BP=0时,显示数据为“1”;G1801DG不显示位的状态与BP状态相同;定时间隔地将驱动信号取反,以实现交流驱动波形。
③编程的思路。首先建立显示缓冲区DIS1,DIS2,DI“和显示驱动区DR11,DR12,DR13,实现驱动波形的变化和输出。P1,”,P3为驱动的输出端。各区与驱动输出的对应关系如表6-8所列。
在编程时首先还要建立显示字型数据库。现设显示状态为“1”,不显示状态为“0”。
①硬件构成:用盯51的并口P1,”,P~s实现LCD的静态驱动,如图6-74所示。
②驱动要求:显示位的状态与BP不在同一状态,即当BP=1时,显示数据为“0”,当BP=0时,显示数据为“1”;G1801DG不显示位的状态与BP状态相同;定时间隔地将驱动信号取反,以实现交流驱动波形。
③编程的思路。首先建立显示缓冲区DIS1,DIS2,DI“和显示驱动区DR11,DR12,DR13,实现驱动波形的变化和输出。P1,”,P3为驱动的输出端。各区与驱动输出的对应关系如表6-8所列。
在编程时首先还要建立显示字型数据库。现设显示状态为“1”,不显示状态为“0”。
上一篇:多位液晶显示驱动器
上一篇:各区与驱动输出的对应关系
 相关技术资料
相关技术资料- 9-14电力营销稽查基本程序
- 9-14电力营销稽查基本程序
- 9-14电力营销稽查基本程序
- 11-8Eu2+荧光体也体现了良好的发光性能
- 10-17使用并行接口驱动静态LCD
- 相关IC型号
- G1801DG
- 暂无最新型号
热门点击
- 平均值与有效值的区别
- 偏振片的起偏和检偏
- 阻焊定义的焊盘设计
- oLED屏幕的缺点
- 超扭曲向列型(STN)LCD
- 元件孔一定要设计在基本格
- 晶圆掺杂物的再分布
- 地球表面的空气水平运动称为风
- 更大的晶 圆表面台阶高度变化和晶圆直径增大造
- LCD驱动系统及LCD模块电路构成
推荐技术资料

- 循线机器人是机器人入门和
- 循线机器人是机器人入门和比赛最常用的控制方式,E48S... [详细]
 公网安备44030402000607
公网安备44030402000607





