
基本锁相环系统模型仿真分析
发布时间:2016/3/24 20:15:35 访问次数:752
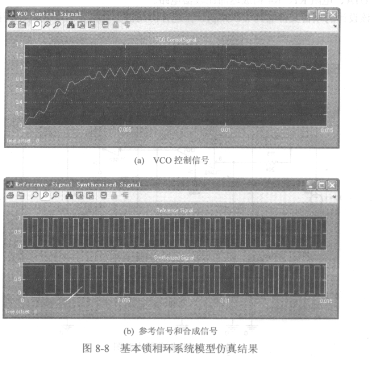
完成系统模型构建及参数设置后,在模型窗口中选择执行File\Model Properties命令,在打MAX4163EUA+T开的窗口中选择Callbacks标签页,在Model pre-load function列表中设置参考信号频率j;=2000Hz,压控振荡器增益Kvco=1800×27c,压控振荡器的自由振荡频率w =150×2兀,LPF的截止频率无=10Hz。此后,在Simulink模型窗口选择执行Simulation/Configuration parameters命令,在打开的配置参数对话框中设置仿真参数:Start time - O.Os,Stop time=1.5e-2s.max step size= auto。仿真参数设置完毕后,在模型窗口中执行Simulation―Start命令启动仿真过程,仿真结束后双击Scope模块可以看到如图8-8所示VCO控制信号、参考信号和合成信号波形,根据VCO控制信号可以发现9ms后锁相环的频率锁定,但是VCO控制信号波形有较大波动,合成信号频率有短暂的漂移。
(a) VCO控制信号 (b)参考信号和合成信号
图8-8基本锁相环系统模型仿真结果
完成系统模型构建及参数设置后,在模型窗口中选择执行File\Model Properties命令,在打MAX4163EUA+T开的窗口中选择Callbacks标签页,在Model pre-load function列表中设置参考信号频率j;=2000Hz,压控振荡器增益Kvco=1800×27c,压控振荡器的自由振荡频率w =150×2兀,LPF的截止频率无=10Hz。此后,在Simulink模型窗口选择执行Simulation/Configuration parameters命令,在打开的配置参数对话框中设置仿真参数:Start time - O.Os,Stop time=1.5e-2s.max step size= auto。仿真参数设置完毕后,在模型窗口中执行Simulation―Start命令启动仿真过程,仿真结束后双击Scope模块可以看到如图8-8所示VCO控制信号、参考信号和合成信号波形,根据VCO控制信号可以发现9ms后锁相环的频率锁定,但是VCO控制信号波形有较大波动,合成信号频率有短暂的漂移。
(a) VCO控制信号 (b)参考信号和合成信号
图8-8基本锁相环系统模型仿真结果
上一篇:基本锁相环总体模型
上一篇:SLPS协同仿真技术
 相关技术资料
相关技术资料- 3-24基本锁相环系统模型仿真分析

 公网安备44030402000607
公网安备44030402000607





