

坐标变换和变换矩阵
发布时间:2015/12/30 20:07:15 访问次数:458
在得到异步电动机的动态数学模型后,要分析和求解这组非线性方程显然是十分困难的。ADS1100A4IDBVR在实际应用中必须设法予以简化,要简化数学模型,须从简化磁链关系人手,简化的基本方法是坐标变换。
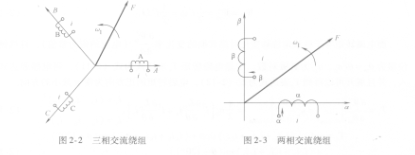
坐标变换的思路是,将交流电动机的物理模型(见图2-2)等效地变换成类似直流电动机的模式,这样分析和控制就可以大大简化。不同电动机模型彼此等效的原则是:在不同坐标下所产生的磁动势完全一致。
根据电机学知识,交流电动机三相对称的静止绕组A、B、C,通以三相平衡的正弦电流时,所产生的合成磁动势是旋转磁动势F,它在空间呈正弦分布,以同步转速∞,(即电流的角频率)顺着A-B.C的相序旋转,如图2-2所示。
然而,旋转磁动势并不一定非要三相不可,除单相以外,二相、三相、四相等任意对称的多相绕组,通以平衡的多相电流,都能产生旋转磁动势,当然以两相最为简单。
图2-3中绘出了两相静止绕组仪和B.它们在空间互差900,通以时间上互差900的两相平衡交流电流,也产生旋转磁动势F。
在得到异步电动机的动态数学模型后,要分析和求解这组非线性方程显然是十分困难的。ADS1100A4IDBVR在实际应用中必须设法予以简化,要简化数学模型,须从简化磁链关系人手,简化的基本方法是坐标变换。
坐标变换的思路是,将交流电动机的物理模型(见图2-2)等效地变换成类似直流电动机的模式,这样分析和控制就可以大大简化。不同电动机模型彼此等效的原则是:在不同坐标下所产生的磁动势完全一致。
根据电机学知识,交流电动机三相对称的静止绕组A、B、C,通以三相平衡的正弦电流时,所产生的合成磁动势是旋转磁动势F,它在空间呈正弦分布,以同步转速∞,(即电流的角频率)顺着A-B.C的相序旋转,如图2-2所示。
然而,旋转磁动势并不一定非要三相不可,除单相以外,二相、三相、四相等任意对称的多相绕组,通以平衡的多相电流,都能产生旋转磁动势,当然以两相最为简单。
图2-3中绘出了两相静止绕组仪和B.它们在空间互差900,通以时间上互差900的两相平衡交流电流,也产生旋转磁动势F。
上一篇:变频器的原理与控制方式
上一篇:两个旋转磁动势大小和转速都相等
 相关技术资料
相关技术资料- 12-30坐标变换和变换矩阵
- 8-29IP地址都是32位的二进制代码
热门点击
- 为什么安装电抗器可以有效抑制谐波?
- 晶体管在线处于放大状态怎么进行判断?
- 什么是多段速运行呢?
- 什么是变频器的外部给定方式?
- 某75kW变频器当频率上升到30HZ左右时会
- 电感线圈在几种电路中的作用
- 怎样测量电阻值
- 集成电路的技术参数
- 后级功率放大电路中使用的互补推挽对管
- 什么是变频器的信号通信方式?
推荐技术资料

- 硬盘式MP3播放器终级改
- 一次偶然的机会我结识了NE0 2511,那是一个远方的... [详细]
 公网安备44030402000607
公网安备44030402000607





