

�Žŵ�ʱ����ͨ�������˺�ҡ�۵ȹ���������ʹ�����ƫת��
����ʱ��:2023/7/10 22:44:45 ���ʴ���:24
�紫����ϵͳ�IJ���ֲ��ݻ���ʱ,��ƫת�Ų��ݻ���,ƽ��ʽ�ŵ�,�Ų��ݻ����нŵ�ƽ��ʽ�ͽŵ�����ʽ���֡�
�Ǹ�Ϊһ�ֽŵ�ƽ��ʽ�Ų��ݻ�����
�ŵŰ�װ����������˺������ŵŸ���ɵ�ƽ���ı��λ����ϡ�
��ʻԱ�Žŵ�ʱ,������˷ֱ���ת��0��0��ת��(ת��̶������յװ���),������(����)�ȵĴ���,ʹ�����ƫת��
ƽ���ı��λ����������DZ�֤�ڲ��ݷ����ʱ,�ŵ�ֻ��ƽ�ƶ���ת��(��ͼ��˫�㻮����ʾ),�Ա��ڼ�ʻԱ���ݡ�

����Ҫ�˽�ͼֽ�ϵĸ�����ͷ��������ʲô����,���˽�ͼֽ�Ͻ����������ƽ��ͼ��
�����Ҫ�����ǽ�����������IJ���ͼ,����ϸ�Ķ��������ϵͳ��ͼֽ,��������˵����ͼ������š����ֵ���ϸ�����������Ժ������嵥�����һ��������
ǿ��ʶͼ�Ļ�������,�ɲ�һ���ĵ���Ԫ������ɵ�ǿ���·,Ҫ���ͼ��Ա��Ҫ�߸�һ���ĵ繤�����Ӽ����Ļ���֪ʶ,�����ſ���Ū���ױ�����·����ι�����,��Դ������Ϊ���ع����,���Ƶ�·���������Ƶ�·�ġ�
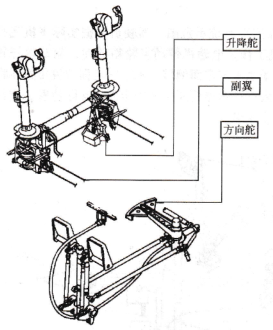
����ʽ�ŵ�,�ŵ�ƽ��ʽ�Ų��ݻ���,Ϊ���ֽŵ�����ʽ�Ų��ݻ�����ǰ�ߵ�ת���ڽŵ���,���ߵ�ת��(a-a��b-b��)�ڽŵ�֮�¡�
��ͼ�пɼ�,�Žŵ�ʱ,���Ƕ���ͨ�������˺�ҡ�۵ȹ����Ĵ�����ʹ�����ƫת�ġ�
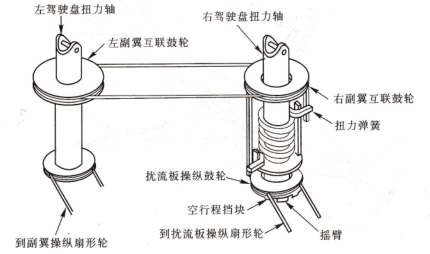
ͬʱ,���ڴ����˺�ҡ�۵ȵ�����,���ҽŵŵĶ�����Э����,��һ���ŵ���ǰʱ,��һ���ŵ����
������ͨ��,�����ñ��ĺڱ��ʽ�I�ĵ�4��(����Դ��)���ʽ�LM393�ĵ�1������1)��
�紫����ϵͳ�IJ���ֲ��ݻ���ʱ,��ƫת�Ų��ݻ���,ƽ��ʽ�ŵ�,�Ų��ݻ����нŵ�ƽ��ʽ�ͽŵ�����ʽ���֡�
�Ǹ�Ϊһ�ֽŵ�ƽ��ʽ�Ų��ݻ�����
�ŵŰ�װ����������˺������ŵŸ���ɵ�ƽ���ı��λ����ϡ�
��ʻԱ�Žŵ�ʱ,������˷ֱ���ת��0��0��ת��(ת��̶������յװ���),������(����)�ȵĴ���,ʹ�����ƫת��
ƽ���ı��λ����������DZ�֤�ڲ��ݷ����ʱ,�ŵ�ֻ��ƽ�ƶ���ת��(��ͼ��˫�㻮����ʾ),�Ա��ڼ�ʻԱ���ݡ�
����Ҫ�˽�ͼֽ�ϵĸ�����ͷ��������ʲô����,���˽�ͼֽ�Ͻ����������ƽ��ͼ��
�����Ҫ�����ǽ�����������IJ���ͼ,����ϸ�Ķ��������ϵͳ��ͼֽ,��������˵����ͼ������š����ֵ���ϸ�����������Ժ������嵥�����һ��������
ǿ��ʶͼ�Ļ�������,�ɲ�һ���ĵ���Ԫ������ɵ�ǿ���·,Ҫ���ͼ��Ա��Ҫ�߸�һ���ĵ繤�����Ӽ����Ļ���֪ʶ,�����ſ���Ū���ױ�����·����ι�����,��Դ������Ϊ���ع����,���Ƶ�·���������Ƶ�·�ġ�
����ʽ�ŵ�,�ŵ�ƽ��ʽ�Ų��ݻ���,Ϊ���ֽŵ�����ʽ�Ų��ݻ�����ǰ�ߵ�ת���ڽŵ���,���ߵ�ת��(a-a��b-b��)�ڽŵ�֮�¡�
��ͼ�пɼ�,�Žŵ�ʱ,���Ƕ���ͨ�������˺�ҡ�۵ȹ����Ĵ�����ʹ�����ƫת�ġ�
ͬʱ,���ڴ����˺�ҡ�۵ȵ�����,���ҽŵŵĶ�����Э����,��һ���ŵ���ǰʱ,��һ���ŵ����
������ͨ��,�����ñ��ĺڱ��ʽ�I�ĵ�4��(����Դ��)���ʽ�LM393�ĵ�1������1)��
 ��ؼ�������
��ؼ�������- 5-9���缫���ݴ�����AD7148
- 5-9����ʽ��ѹ�����ƽƽ���ѹ����������Ӧ��
- 5-9���źŴ���оƬ AGC001����ԭ��
- 5-9ȫ���Ŵ��ڼ���оƬWTM2101
- 5-9���ڼ���оƬ�����Ƴ̽ڵ�δ����չ����̽��
- 5-9���ʹ洢����������̬�������
- 5-9Google Glass Enterprise Edition 2
- 5-8����SOC ����оƬ GD30DRE508 ϵ��
- 5-8ARM Cortex-M7 600MHz �ں�GD3
- 5-8�洢��MCU ��ģ��оƬӦ��ǰ������
- 5-8�߱���������﮵��������չ����
- 5-8ģ�黯���ƽ�ܹ���MMC��Ӧ�ò�������
�������
- 50mA����ͨ�����������������ͺ�����Ե�
- �����������Ľ�����״������������Ľ�����״��
- �ߴ��������ᷢ����ѹ����������ʽ������������
- ���ƻ���֬zGNϵ������80-100��ϳ�
- ��Ͳǰ���Ŵ��·һ��Ҳ�ϸ�19018�����ڸ�
- ˮ��ͷ���ͺ�ѡ������ǯ��ǯ����Ҳ�ḽ�����ڱ�
- ����ֶ�ʱ���������ٷֶϵ绡�Դ����ͷ
- ������������ʱ����ͨ������������ͷŵ���
- �˲������п�����������ֹ����������ĸ��Ŵ���
- ����ʽֱ���綯���ϵ�ѹ�㷢���仯���ոı䶨��
�Ƽ���������

- ҵ��������PCM2702
- PGM2702����SSOP28��װ������С���ܣ�EP3... [��ϸ]
- ���缫���ݴ�����AD7148
- ����ʽ��ѹ�����ƽƽ���ѹ����
- ���źŴ���оƬ AGC001��
- ȫ���Ŵ��ڼ���оƬWTM21
- ���ڼ���оƬ�����Ƴ̽ڵ�δ����չ����̽��
- ���ʹ洢����������̬�������
- ��ý��Э������SM501��Ƕ��ʽϵͳ�е�Ӧ��
- ����IEEE802.11b��EPA�¶ȱ�����
- QUICCEngine�������ƶ�IP�������
- SoC���������IJ�ҵ����
- MPC8xxϵ�д�������Ƕ��ʽϵͳ��Դ���
- dsPIC�����ڽ�����Ƶ�����е�Ӧ���о�
 ��������44030402000607
��������44030402000607





