
TIBPAL20R4-20MJT 电机的位置和速度控制集成电路
发布时间:2020/3/2 8:41:17 访问次数:706
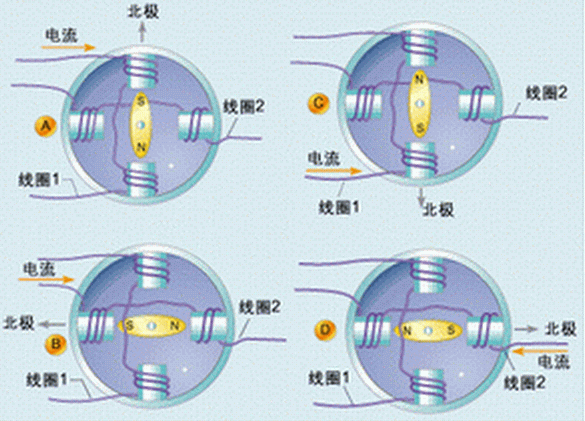
TIBPAL20R4-20MJT定子、转子是用硅钢片或其他软磁材料制成的。定子的每对极上都绕有一对绕组,构成一相绕组,共三相称为A、B、C三相。在定子磁极和转子上都开有齿分度相同的小齿,采用适当的齿数配合,当A相磁极的小齿与转子小齿一一对应时,B相磁极的小齿与转子小齿相互错开1/3齿距,C相则错开2/3齿距。A相绕组与齿1、5一一对应,而此时B相绕组与齿2错开1/3齿距,而与齿3错开2/3齿距,C相绕组与齿3错开2/3齿距,而与齿4错开1/3齿距。电机的位置和速度由绕组通电次数(脉冲数)和频率成一一对应关系。而方向由绕组通电的顺序决定。

控制精度不同步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸)
低频特性不同步进电机的输出力矩随转速升高而下降,且在较高转速时会急剧下降,所以其最高工作转速一般在300~600RPM。交流伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。
转子的外圈由 50个小齿构成,转子 1 和转子 2 的小齿于构造上互 相错开 1/2 螺距。由此转子形成了100个小齿。目前已经有转子单个加工至100齿的高分辨率型,那么高分辨率型的转子就有200个小齿。因此其机械上就可以实现普通步进电机半步(普通步进电机半步需要电气细分达到)的分辨率。
功率式:输出转矩较大,能直接带动较大负载(一般使用反应式、混合式步进电动机)。
伺服式:输出转矩较小,只能带动较小负载(一般使用永磁式、混合式步进电动机)。
步进电动机的选择:
首先选择类型,其次是具体的品种与型号。
反应式、永磁式和混合式三种步进电动机的性能指标、外形尺寸、安装方法、脉冲电源种类和控制电路等都不同,价格差异也很大,选择时应综合考虑。
具有控制集成电路的步进电动机应优先考虑。

深圳市唯有度科技有限公司http://wydkj.51dzw.com/
(素材来源:21IC.如涉版权请联系删除。特别感谢)
TIBPAL20R4-20MJT定子、转子是用硅钢片或其他软磁材料制成的。定子的每对极上都绕有一对绕组,构成一相绕组,共三相称为A、B、C三相。在定子磁极和转子上都开有齿分度相同的小齿,采用适当的齿数配合,当A相磁极的小齿与转子小齿一一对应时,B相磁极的小齿与转子小齿相互错开1/3齿距,C相则错开2/3齿距。A相绕组与齿1、5一一对应,而此时B相绕组与齿2错开1/3齿距,而与齿3错开2/3齿距,C相绕组与齿3错开2/3齿距,而与齿4错开1/3齿距。电机的位置和速度由绕组通电次数(脉冲数)和频率成一一对应关系。而方向由绕组通电的顺序决定。
控制精度不同步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸)
低频特性不同步进电机的输出力矩随转速升高而下降,且在较高转速时会急剧下降,所以其最高工作转速一般在300~600RPM。交流伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。
转子的外圈由 50个小齿构成,转子 1 和转子 2 的小齿于构造上互 相错开 1/2 螺距。由此转子形成了100个小齿。目前已经有转子单个加工至100齿的高分辨率型,那么高分辨率型的转子就有200个小齿。因此其机械上就可以实现普通步进电机半步(普通步进电机半步需要电气细分达到)的分辨率。
功率式:输出转矩较大,能直接带动较大负载(一般使用反应式、混合式步进电动机)。
伺服式:输出转矩较小,只能带动较小负载(一般使用永磁式、混合式步进电动机)。
步进电动机的选择:
首先选择类型,其次是具体的品种与型号。
反应式、永磁式和混合式三种步进电动机的性能指标、外形尺寸、安装方法、脉冲电源种类和控制电路等都不同,价格差异也很大,选择时应综合考虑。
具有控制集成电路的步进电动机应优先考虑。
深圳市唯有度科技有限公司http://wydkj.51dzw.com/
(素材来源:21IC.如涉版权请联系删除。特别感谢)
 相关技术资料
相关技术资料- 7-12PWM输入功率驱动器工作原理
- 7-12隔离式 DC/DC 变换器和模块优势特征
- 7-12解读集成4 个高效降压 DC/DC 变换器
- 7-12数字隔离功能全集成 DC/DC 电源变换器简述
- 7-12集成低噪声电流输入模数转换器 (ADC)应用详解
- 7-12128 通道20 位电流数字转换器应用探究
- 7-11最新12kW量产电源参考设计简述
- 7-11第三代快速碳化硅MOSFET技术参数应用
- 7-11800 V高压直流 (HVDC)全新架构电源系统
- 7-11串行千兆位媒体独立接口(SGMII和RGMII)
- 7-11Analog Devices ADIN3310应用详情
- 7-11干簧传感器MK17系列应用详解

 公网安备44030402000607
公网安备44030402000607





