

拖动系统的参数折算
发布时间:2018/1/7 9:40:57 访问次数:656
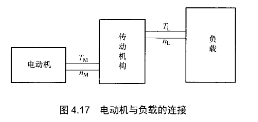
拖动系统的运行状态是对电动机和负载的机械特性进行比较而得到的。传动机OPA2348AIDR构却将同一状态下电动机和负载的转速值变得不一样了,使它们无法在同一个坐标系里进行比较。为了解决这个问题,需要将电动机的电磁转矩、负载转矩、飞轮力矩折算到同一根轴上,一般是折算到电动机的轴上。折算的原则是保证各轴所传递的机械功率不变和存储的动能相同。在图4.17中,如忽略传动机构的功率损耗,则传动机构输入侧和输出侧的机械功率应相等,根据式⒁-16)可知,有:
速度调节。由于电动机结构参数及其所带负载的特性对变频器的正常工作有着极大的影响,所以应掌握异步电动机运行时定子、转子电动势平衡方程、电流方程及其功率传递过程;掌握异步电动机的机械特性,调速时的机械特性;掌握电动机的制动方式;掌握电动机的工作及其容量选择;掌握负载类型、恒转矩、恒功率及二次方律负载的特点和对应的机械特性;了解电力拖动系统的构成和传动机构的作用。
拖动系统的运行状态是对电动机和负载的机械特性进行比较而得到的。传动机OPA2348AIDR构却将同一状态下电动机和负载的转速值变得不一样了,使它们无法在同一个坐标系里进行比较。为了解决这个问题,需要将电动机的电磁转矩、负载转矩、飞轮力矩折算到同一根轴上,一般是折算到电动机的轴上。折算的原则是保证各轴所传递的机械功率不变和存储的动能相同。在图4.17中,如忽略传动机构的功率损耗,则传动机构输入侧和输出侧的机械功率应相等,根据式⒁-16)可知,有:
速度调节。由于电动机结构参数及其所带负载的特性对变频器的正常工作有着极大的影响,所以应掌握异步电动机运行时定子、转子电动势平衡方程、电流方程及其功率传递过程;掌握异步电动机的机械特性,调速时的机械特性;掌握电动机的制动方式;掌握电动机的工作及其容量选择;掌握负载类型、恒转矩、恒功率及二次方律负载的特点和对应的机械特性;了解电力拖动系统的构成和传动机构的作用。
上一篇:拖动系统
上一篇:简述异步电动机的工作原理
 相关技术资料
相关技术资料- 1-8异步电动机与直流电动机转矩产生的原理有很大的区别
- 1-7拖动系统的参数折算
- 10-23但是过量的反溅射必然会破坏沟槽和通孔的形貌
- 5-28反应气体
热门点击
 公网安备44030402000607
公网安备44030402000607





