
相机整体扫描
发布时间:2017/4/25 21:48:20 访问次数:524
一些舰载、车载的光电搜索跟踪一体化的设备(IRST)采用了传感头整体扫描搜索的工作模式,传感头内通常装载了多种不同工作波段的传感器组件,M24128-BWMN6P由于各个传感器光学系统相对独立,这类光电系统称之为多孔径系统。
传感头可以绕相互正交的方位轴、俯仰轴做整体旋转或摆动,可以改变各个传感组件共同的视轴的空间指向,实现大空域范围的二维搜索。这种扫描方式对系统光学像质的影响最小,不需要结构庞大的摆镜,也不会产生像旋。
全方位光电搜索设备一般采用长线列探测器并扫,如果传感头只做匀速旋转不摆动,线视场在空域平扫,形成360°的扫描带。扫描带的宽度即为线列探测器所对应的光学视场。如果传感头在方位旋转的同时,俯仰方向也同步地线性摆动,则可形成螺旋状的扫描带,覆盖更大的俯仰空域,如图3-67所示。
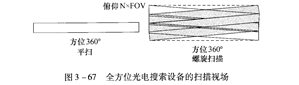
图3-67全方位光电搜索设备的扫描视场
光学传感头整体旋转、摆动扫描需要驱动机械惯量极大的传感头。另外,由于探测器也随之旋转,如要求全方位搜索,传感头的工作电源、控制信号和探测器输出信号都必须通过滑环(导流环)进出。
传感头整体旋转、摆动扫描的最大好处是无像旋,即线列或面阵传感器看到的空间像是不旋转的。
一些舰载、车载的光电搜索跟踪一体化的设备(IRST)采用了传感头整体扫描搜索的工作模式,传感头内通常装载了多种不同工作波段的传感器组件,M24128-BWMN6P由于各个传感器光学系统相对独立,这类光电系统称之为多孔径系统。
传感头可以绕相互正交的方位轴、俯仰轴做整体旋转或摆动,可以改变各个传感组件共同的视轴的空间指向,实现大空域范围的二维搜索。这种扫描方式对系统光学像质的影响最小,不需要结构庞大的摆镜,也不会产生像旋。
全方位光电搜索设备一般采用长线列探测器并扫,如果传感头只做匀速旋转不摆动,线视场在空域平扫,形成360°的扫描带。扫描带的宽度即为线列探测器所对应的光学视场。如果传感头在方位旋转的同时,俯仰方向也同步地线性摆动,则可形成螺旋状的扫描带,覆盖更大的俯仰空域,如图3-67所示。
图3-67全方位光电搜索设备的扫描视场
光学传感头整体旋转、摆动扫描需要驱动机械惯量极大的传感头。另外,由于探测器也随之旋转,如要求全方位搜索,传感头的工作电源、控制信号和探测器输出信号都必须通过滑环(导流环)进出。
传感头整体旋转、摆动扫描的最大好处是无像旋,即线列或面阵传感器看到的空间像是不旋转的。
上一篇:二维指向镜
上一篇:相机整体扫描的一种改进方法
 相关技术资料
相关技术资料- 5-29测量互感器绕组的绝缘电阻的目的是什么,测量有什么要求?
- 5-2目标自动截获
- 4-25相机整体扫描
 公网安备44030402000607
公网安备44030402000607





