

Z编辑“追球“行为
发布时间:2013/11/10 15:59:35 访问次数:657
在系统托盘中找到蓝牙图标,AT28C010-12DK-E右键单击图标选择“添加设备”,列表显示出附近的蓝牙设备。接通EZ-B的电源,等待计算机找到它,然后选择此设备并按“下一步”。当提示配对键时,选择“Provide AKey”并输入1 234。你的计算机上应该显示EZ―B连接有两个COM端口。请注意编号较低的端口,它负责传输PC和EZ.B之间的连接数据。
从ez―robot.com/ez-builder上下载软件EZ―Builder,然后启动软件。这是一个应用程序,你可以通过它对机器人编程(你也可以使用Visual Studio.NET,下载地址为msdn.microsoft.com/en-us/vstudio)。在“添加控制”菜单下选择“连接”,指定COM端口为你建立蓝牙连接时的端臼,然后单击“连接”。接下来选择伺服电机(也在“添加控制”菜单下),分别指定左右伺服电机到引瑚行D14和D13的连接。
现在进行第一次测试。从Windows菜单中向你的工作区添加一个“修改伺服面板”。单击”配置”并选择修改的左右伺服端口,然后点单击“保存”。如果一切顺利,你现在应该可以通过点击箭头按钮或键盘上的箭头键控制挖掘狗在四周运动了。
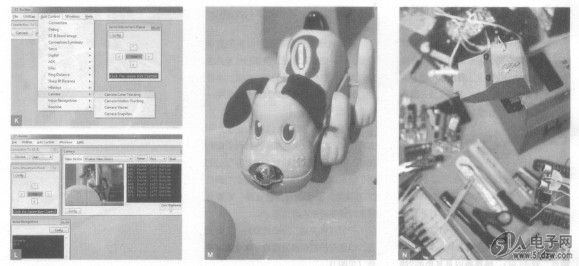
如果你的小车制作成功了,接下来需要在PC机上安装摄像头驱动程序。单击“添加控制一摄像头一摄像头色彩跟踪”(见图K)。你的摄像头会出现在视频设备的下拉列表中。选择你的摄像头,然后把球放在镜头前。从旁边的颜色下拉框中选择球的颜色(我选的是红色)’,然后调整右下角的颜色亮度滑块,直到预览窗口中只能看见球为止(明亮的房间或阳光最适宜摄像头色彩跟踪)。
若耍将色彩跟踪翻译成伺服电机的运动跟踪,先退回“伺服运动面板”,单击“配置”按钮,启动运动跟踪。然后返回到“摄像头色彩跟踪”,钩选“启动向前运动”复选框。这样,当监测的彩色物体在前面时,机器人会向前运动。
现在,你可以让机器狗追着小球走了(见图M)。一段时间内你肯定会玩得’很开心,但是,如果小球滚出了摄像头的视线怎么办?不必手动改变挖掘狗的方向,它可以根据语音命令作出反应。
在系统托盘中找到蓝牙图标,AT28C010-12DK-E右键单击图标选择“添加设备”,列表显示出附近的蓝牙设备。接通EZ-B的电源,等待计算机找到它,然后选择此设备并按“下一步”。当提示配对键时,选择“Provide AKey”并输入1 234。你的计算机上应该显示EZ―B连接有两个COM端口。请注意编号较低的端口,它负责传输PC和EZ.B之间的连接数据。
从ez―robot.com/ez-builder上下载软件EZ―Builder,然后启动软件。这是一个应用程序,你可以通过它对机器人编程(你也可以使用Visual Studio.NET,下载地址为msdn.microsoft.com/en-us/vstudio)。在“添加控制”菜单下选择“连接”,指定COM端口为你建立蓝牙连接时的端臼,然后单击“连接”。接下来选择伺服电机(也在“添加控制”菜单下),分别指定左右伺服电机到引瑚行D14和D13的连接。
现在进行第一次测试。从Windows菜单中向你的工作区添加一个“修改伺服面板”。单击”配置”并选择修改的左右伺服端口,然后点单击“保存”。如果一切顺利,你现在应该可以通过点击箭头按钮或键盘上的箭头键控制挖掘狗在四周运动了。
如果你的小车制作成功了,接下来需要在PC机上安装摄像头驱动程序。单击“添加控制一摄像头一摄像头色彩跟踪”(见图K)。你的摄像头会出现在视频设备的下拉列表中。选择你的摄像头,然后把球放在镜头前。从旁边的颜色下拉框中选择球的颜色(我选的是红色)’,然后调整右下角的颜色亮度滑块,直到预览窗口中只能看见球为止(明亮的房间或阳光最适宜摄像头色彩跟踪)。
若耍将色彩跟踪翻译成伺服电机的运动跟踪,先退回“伺服运动面板”,单击“配置”按钮,启动运动跟踪。然后返回到“摄像头色彩跟踪”,钩选“启动向前运动”复选框。这样,当监测的彩色物体在前面时,机器人会向前运动。
现在,你可以让机器狗追着小球走了(见图M)。一段时间内你肯定会玩得’很开心,但是,如果小球滚出了摄像头的视线怎么办?不必手动改变挖掘狗的方向,它可以根据语音命令作出反应。
上一篇:添加扬声器、LED和摄像头
上一篇:配置语音识别系统
 相关技术资料
相关技术资料- 11-10Z编辑“追球“行为
 公网安备44030402000607
公网安备44030402000607





