

传感和检测系统对OP精度的要求
发布时间:2012/3/2 20:37:23 访问次数:596
对于传感和检测系统可以定义多个精确度等级,如美国国家半导体公司对于精确度等级范围定义从1到4,见表8.1。
表8.1 精确度等级范围定义3R090L
┏━━━━━━┳━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┓
┃ 级 别 ┃ 定 义 ┃
┣━━━━━━╋━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┫
┃ ┃ 构建模块的产品已在集成电路工厂中修整,具有高精度。可以在生命周期内各种温度、电压变 ┃
┃ l ┃ ┃
┃ ┃动下保持精确度 ┃
┣━━━━━━╋━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┫
┃ ┃ 构建模块的产品具有动态误差消除功能,运算放大器、固定增益放大器、可编程增益放大器在 ┃
┃ 2 ┃ ┃
┃ ┃内部自动调零、斩波或斩渡稳定化 ┃
┣━━━━━━╋━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┫
┃ ┃ 构建模块的具有修整接口,允许对增益或失调电压进行微调。可以修整应用,并通过系统校准 ┃
┃ 3 ┃ ┃
┃ ┃补偿传感器的不精确 ┃
┣━━━━━━╋━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┫
┃ ┃ 系统具有动态误差消除功能。系统自行校正漂移。系统性能不受传感器漂移限制,需要“来自 ┃
┃ 4 ┃ ┃
┃ ┃传感器周围的反馈” ┃
┗━━━━━━┻━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┛
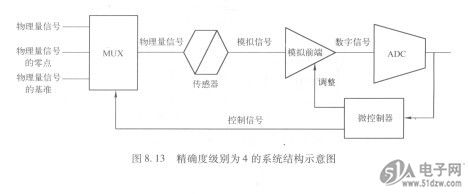
级别2和级别4的产品可以持续校正某些误差,并在生命周期内自行校正漂移。级别2的产品仅持续校正电子装置内的误差,但不补偿传感器内发生的漂移。级别4的产品能够补偿传感器内的误差,因为传感器是系统的组成部分。精确度级别为4的系统结构示意图如图8. 13所示。
对于传感和检测系统可以定义多个精确度等级,如美国国家半导体公司对于精确度等级范围定义从1到4,见表8.1。
表8.1 精确度等级范围定义3R090L
┏━━━━━━┳━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┓
┃ 级 别 ┃ 定 义 ┃
┣━━━━━━╋━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┫
┃ ┃ 构建模块的产品已在集成电路工厂中修整,具有高精度。可以在生命周期内各种温度、电压变 ┃
┃ l ┃ ┃
┃ ┃动下保持精确度 ┃
┣━━━━━━╋━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┫
┃ ┃ 构建模块的产品具有动态误差消除功能,运算放大器、固定增益放大器、可编程增益放大器在 ┃
┃ 2 ┃ ┃
┃ ┃内部自动调零、斩波或斩渡稳定化 ┃
┣━━━━━━╋━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┫
┃ ┃ 构建模块的具有修整接口,允许对增益或失调电压进行微调。可以修整应用,并通过系统校准 ┃
┃ 3 ┃ ┃
┃ ┃补偿传感器的不精确 ┃
┣━━━━━━╋━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┫
┃ ┃ 系统具有动态误差消除功能。系统自行校正漂移。系统性能不受传感器漂移限制,需要“来自 ┃
┃ 4 ┃ ┃
┃ ┃传感器周围的反馈” ┃
┗━━━━━━┻━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┛
级别2和级别4的产品可以持续校正某些误差,并在生命周期内自行校正漂移。级别2的产品仅持续校正电子装置内的误差,但不补偿传感器内发生的漂移。级别4的产品能够补偿传感器内的误差,因为传感器是系统的组成部分。精确度级别为4的系统结构示意图如图8. 13所示。
上一篇:8V 330nA低功耗运算放大器
上一篇:所需振幅精度与有效带宽的关系
 相关技术资料
相关技术资料- 3-2传感和检测系统对OP精度的要求
- 相关IC型号
- 3R090L
- 暂无最新型号

 公网安备44030402000607
公网安备44030402000607





