
传感器的特性
发布时间:2019/8/10 17:23:40 访问次数:1584
传感器的特性I019-ALC-45
传感器的特性分为静态特性和动态特性两种,传感器的各种特性主要是根据输出量与输人量之间的关系进行描述的。传感器在稳态(输人量为常量或变化极为缓慢的状态)信号作用下,输入和输出的对应关系称为静态特性;在动态(输人信号随时间作快速变化的状态)信号作用下,输人和输出的对应关系称为动态特性。
传感器的静态特性
线性度
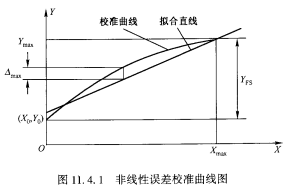
理想传感器的输出与输入呈线性关系。然而,实际的传感器即使在量程范围内,其输出与输入的线性关系并不是理想的线性关系,总存在一定的非线性。线性度是评价非线性程度的参数。其定义为:传感器的输出-输人校准曲线与理论拟合直线之间的最大偏差与传感器满量
程输出之比,称为该传感器的“非线性误 】差”或称“线性度”,也称“日u线性度”。通 瓴孙常用相对误差表示其大小:式中,γL为非线性误差(线性度),△max为校准曲线与理想拟合直线间的最大偏差,yFs为传感器满量程输出平均值,如图11.4.1所示。
传感器的特性I019-ALC-45
传感器的特性分为静态特性和动态特性两种,传感器的各种特性主要是根据输出量与输人量之间的关系进行描述的。传感器在稳态(输人量为常量或变化极为缓慢的状态)信号作用下,输入和输出的对应关系称为静态特性;在动态(输人信号随时间作快速变化的状态)信号作用下,输人和输出的对应关系称为动态特性。
传感器的静态特性
线性度
理想传感器的输出与输入呈线性关系。然而,实际的传感器即使在量程范围内,其输出与输入的线性关系并不是理想的线性关系,总存在一定的非线性。线性度是评价非线性程度的参数。其定义为:传感器的输出-输人校准曲线与理论拟合直线之间的最大偏差与传感器满量
程输出之比,称为该传感器的“非线性误 】差”或称“线性度”,也称“日u线性度”。通 瓴孙常用相对误差表示其大小:式中,γL为非线性误差(线性度),△max为校准曲线与理想拟合直线间的最大偏差,yFs为传感器满量程输出平均值,如图11.4.1所示。
上一篇:分辨力与阈值
 相关技术资料
相关技术资料- 8-10传感器的特性
- 相关IC型号
- I019-ALC-45
- 暂无最新型号
 公网安备44030402000607
公网安备44030402000607





