
感应元件包含两个机械耦合的感应系统
发布时间:2019/4/28 21:19:45 访问次数:1577
接口用0,35um CMOS工艺设计和制造,用本章参考文献[⒛]提到的陀螺仪测试。图5.41为一个感应元件的扫描电子显微镜图(SEM图)。图5.41为测试的检测轴的频率响应。此外靠近15kHz的主谐振,能发现许多在宽频率范围内 的寄生谐振模式,主要的模式大约在呖kHz和300kHz。这些模式通常会在传统超前补偿环路有问题,并且易于通过正反馈补偿方案调整。
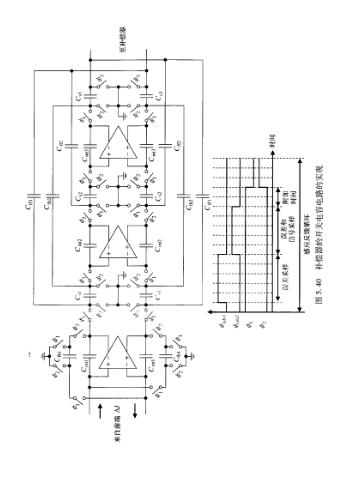
图541 感应元件的SEM图(感应元件包含两个机械耦合的感应系统)为一个封装好的感应元件和读出器ASIC的显微照片。该接口有效面积为(0.8×0,4)mm2,在3.3Ⅴ和12Ⅴ时功耗低于1mw。⒓Ⅴ是用于高压开关电容的积分器(累加器)以产生静电调谐电压。大约⒛%的功率用于位置感应前端,还有10%用在开关电容过滤器。另外的10%是消耗在高压开关电容积分器,剩下的大约硐%用于在每个采样周期的不同阶段的感应元件的检测质量块和感应节点转换导致的C′损耗.
额外的电路(不包括在1mW内)是一个常规的开关电容充电积分器前端和检测陀螺仪驱动运动的缓冲区:该数字模块,其中包括数字ΣΔ调制器、数字π型过滤器、校准信号合成器和解调器,都可以在Xilillx FPGA中实现。封装好的陀螺仪和读出器ASIC安装在一个测试板上,其包括提供稳定供给电压的调节器、产生偏置电流的电位器以及驱动FPGA的缓冲区。测试版安装在一个速度表上以完成角速度的测量。比较了测量的输出频谱和分析预计的输出频谱。输出频谱整体的形状和预计的描述函数模型很好地吻合。图5。0~s为当振幅为5.3°/s,在笏Hz正弦变化的角速度时测量的是否带校准的输出频谱。正弦速率信号显示在驱动频率15.49kHz的调制振幅。频谱分量由于科氏偏置量及正交误差和驱动频率一致。在驱动频率偏置大约笏0Hz的频谱成分是导频。校准防止在未校准系统中固有的噪声陷波的错位。
接口用0,35um CMOS工艺设计和制造,用本章参考文献[⒛]提到的陀螺仪测试。图5.41为一个感应元件的扫描电子显微镜图(SEM图)。图5.41为测试的检测轴的频率响应。此外靠近15kHz的主谐振,能发现许多在宽频率范围内 的寄生谐振模式,主要的模式大约在呖kHz和300kHz。这些模式通常会在传统超前补偿环路有问题,并且易于通过正反馈补偿方案调整。
图541 感应元件的SEM图(感应元件包含两个机械耦合的感应系统)为一个封装好的感应元件和读出器ASIC的显微照片。该接口有效面积为(0.8×0,4)mm2,在3.3Ⅴ和12Ⅴ时功耗低于1mw。⒓Ⅴ是用于高压开关电容的积分器(累加器)以产生静电调谐电压。大约⒛%的功率用于位置感应前端,还有10%用在开关电容过滤器。另外的10%是消耗在高压开关电容积分器,剩下的大约硐%用于在每个采样周期的不同阶段的感应元件的检测质量块和感应节点转换导致的C′损耗.
额外的电路(不包括在1mW内)是一个常规的开关电容充电积分器前端和检测陀螺仪驱动运动的缓冲区:该数字模块,其中包括数字ΣΔ调制器、数字π型过滤器、校准信号合成器和解调器,都可以在Xilillx FPGA中实现。封装好的陀螺仪和读出器ASIC安装在一个测试板上,其包括提供稳定供给电压的调节器、产生偏置电流的电位器以及驱动FPGA的缓冲区。测试版安装在一个速度表上以完成角速度的测量。比较了测量的输出频谱和分析预计的输出频谱。输出频谱整体的形状和预计的描述函数模型很好地吻合。图5。0~s为当振幅为5.3°/s,在笏Hz正弦变化的角速度时测量的是否带校准的输出频谱。正弦速率信号显示在驱动频率15.49kHz的调制振幅。频谱分量由于科氏偏置量及正交误差和驱动频率一致。在驱动频率偏置大约笏0Hz的频谱成分是导频。校准防止在未校准系统中固有的噪声陷波的错位。
上一篇:补偿器
 相关技术资料
相关技术资料- 4-28感应元件包含两个机械耦合的感应系统

 公网安备44030402000607
公网安备44030402000607





