
跟踪系统的组成及其分类
发布时间:2017/5/2 21:17:54 访问次数:1011
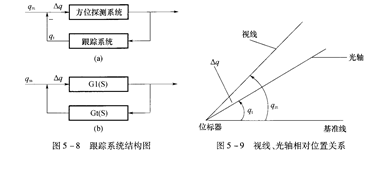
红外跟踪系统由方位探测系统及跟踪机构两大部分组成,见图5-8。按照目标种类来划分,M24C04-WBN6跟踪系统可分为点源跟踪系统(跟踪点源目标)和扩展源跟踪系统(跟踪扩展源即面源目标)。根据方位探测系统的类型来划分,跟踪系统可分为调制盘跟踪系统、十字叉跟踪系统、扫描跟踪系统和成像跟踪系统。有时把方位探测系统(除信号处理电路外)与跟踪机构组成的测量跟踪头统称为位标器。
跟踪系统工作原理――速度跟踪原理
目标与位标器的连线称为视线。图5-9为同一平面内的视线、光轴相对位置图。当目标位于光轴上时(gt=gm),方位探测系统无误差信号输出。由于目标的运动,使目标偏离光轴,即gt≠gm,系统便输出与失调角Δg=gm-gt相对应的方位误差信号。该误差信号送人跟踪机构,跟踪机构便驱动位标器向着减小失调角Δg的方向运动。当由于目标的运动,再次加大Δg时,位标器的运动又重复上述过程。这样,系统便自动跟踪了目标。
红外跟踪系统由方位探测系统及跟踪机构两大部分组成,见图5-8。按照目标种类来划分,M24C04-WBN6跟踪系统可分为点源跟踪系统(跟踪点源目标)和扩展源跟踪系统(跟踪扩展源即面源目标)。根据方位探测系统的类型来划分,跟踪系统可分为调制盘跟踪系统、十字叉跟踪系统、扫描跟踪系统和成像跟踪系统。有时把方位探测系统(除信号处理电路外)与跟踪机构组成的测量跟踪头统称为位标器。
跟踪系统工作原理――速度跟踪原理
目标与位标器的连线称为视线。图5-9为同一平面内的视线、光轴相对位置图。当目标位于光轴上时(gt=gm),方位探测系统无误差信号输出。由于目标的运动,使目标偏离光轴,即gt≠gm,系统便输出与失调角Δg=gm-gt相对应的方位误差信号。该误差信号送人跟踪机构,跟踪机构便驱动位标器向着减小失调角Δg的方向运动。当由于目标的运动,再次加大Δg时,位标器的运动又重复上述过程。这样,系统便自动跟踪了目标。
上一篇:红外凝视系统
上一篇:对跟踪系统的主要要求
 相关技术资料
相关技术资料- 5-2跟踪系统的组成及其分类
- 4-25四方棱镜扫描相机典型光学结构

 公网安备44030402000607
公网安备44030402000607





