
AOA定位算法
发布时间:2012/4/3 23:01:29 访问次数:17269
基于到达角度的AOA定位算法,未知节点通过ZR36504TQCG 天线阵列和多个超声波接收器感知信标节点的发送信号的方向,计算未知节点和信标节点之间的方位角等,再通过角度测量法计算未知节点的位置。下面以每个节点配有两个超声波接收机为例对AOA定位机制进行叙述。
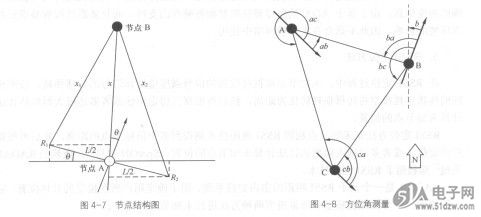
如图4-7所示,其中节点A为未知节点,节点B为信标节点,两个接收机Ri和R2之间的距离为三,两个接收机的连线的中垂线为节点A的轴线,xl、X2分别为风和R2到信标节点的距离,角秒为节点B相对于节点A的方位角。当节点A的两个接收机收到节点B的信号后,利用TOA披术测出Xl、X2,然后再根据几何关系可以推导出节点B相对于节点A的方位角。
如图4-8所示,利用上面的方法,分别测得相邻3个节点的相对各自的方位角,如节点B相对节点A的方位角为Zab,同样可以测得节点C相对于节点A的方位角Zac,由此可得:ZCAB=Zac-Zab。如果节点B是已知方向的节点,它的轴线相对于指南针方向角为z:b,则可以根据几何知识推导出节点A的轴线相对于指南针的方向角为2兀- (Lba十兀- Zab)+ Zb。由此可知,该算法还可以实现定向功能。
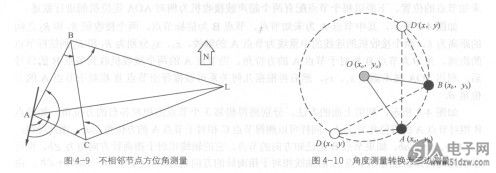
当两个节点不相邻的时候,如何测得两者之间的方位角。如图4-9所示,节点A、B、C为相邻节点,节点L为信标节点,L与B、C不一定互为相邻节点,假设已经测得节点L、B、C之间的方位角,现在求节点L相对于节点A的方位角。
利用上述方法测量节点A、B、C之间的方位角,从而可以得到△ABC的3个内角的大小,由于节点L、B、C之间的方位角已知,故可得△LBC的角度信息,从而可得四边形ACLB的角度信息。进一步可以推导出节点L相对于节点A的方位角。
通过方位角计算方法,未知节点可以计算出多个信标节点相对方位角。未知节点D选出其中3个信标节点,如图4-4所示,其中角ZADC为信标节点A、C相对于节点D的方位角之差,同理可以计算ZADB、ZBDC。此时达到了角度测量的条件,接下来便可进行未知节点坐标位置的计算。
为了提高定位精度,当多于3个信标节点相对一个未知节点的方位角被计算出时,可以使用多边极大似然估计法来进行位置计算。如图4-10所示,节点D为未知节点,节点A、B为信标节点,它们所组成的三角形可以确定一个以D为圆心的圆,由几何知识可知,此圆具有唯一性,可以把圆心D点作为一个虚拟信标节点建立方程,求得该圆半径,假设有个信标节点,则可以建立q个方程,从而可使用多边极大似然估计法求解。
本节以未知节点使用两个接收机为例来进行叙述,在实际应用中利用天线阵列可获得精确的角度信息,由于基于AOA昀定位算法需要额外硬件的支持,而且测距过程容易受到外界环境的影响,因此不适合在大规模网络中使用。
基于到达角度的AOA定位算法,未知节点通过ZR36504TQCG 天线阵列和多个超声波接收器感知信标节点的发送信号的方向,计算未知节点和信标节点之间的方位角等,再通过角度测量法计算未知节点的位置。下面以每个节点配有两个超声波接收机为例对AOA定位机制进行叙述。
如图4-7所示,其中节点A为未知节点,节点B为信标节点,两个接收机Ri和R2之间的距离为三,两个接收机的连线的中垂线为节点A的轴线,xl、X2分别为风和R2到信标节点的距离,角秒为节点B相对于节点A的方位角。当节点A的两个接收机收到节点B的信号后,利用TOA披术测出Xl、X2,然后再根据几何关系可以推导出节点B相对于节点A的方位角。
如图4-8所示,利用上面的方法,分别测得相邻3个节点的相对各自的方位角,如节点B相对节点A的方位角为Zab,同样可以测得节点C相对于节点A的方位角Zac,由此可得:ZCAB=Zac-Zab。如果节点B是已知方向的节点,它的轴线相对于指南针方向角为z:b,则可以根据几何知识推导出节点A的轴线相对于指南针的方向角为2兀- (Lba十兀- Zab)+ Zb。由此可知,该算法还可以实现定向功能。
当两个节点不相邻的时候,如何测得两者之间的方位角。如图4-9所示,节点A、B、C为相邻节点,节点L为信标节点,L与B、C不一定互为相邻节点,假设已经测得节点L、B、C之间的方位角,现在求节点L相对于节点A的方位角。
利用上述方法测量节点A、B、C之间的方位角,从而可以得到△ABC的3个内角的大小,由于节点L、B、C之间的方位角已知,故可得△LBC的角度信息,从而可得四边形ACLB的角度信息。进一步可以推导出节点L相对于节点A的方位角。
通过方位角计算方法,未知节点可以计算出多个信标节点相对方位角。未知节点D选出其中3个信标节点,如图4-4所示,其中角ZADC为信标节点A、C相对于节点D的方位角之差,同理可以计算ZADB、ZBDC。此时达到了角度测量的条件,接下来便可进行未知节点坐标位置的计算。
为了提高定位精度,当多于3个信标节点相对一个未知节点的方位角被计算出时,可以使用多边极大似然估计法来进行位置计算。如图4-10所示,节点D为未知节点,节点A、B为信标节点,它们所组成的三角形可以确定一个以D为圆心的圆,由几何知识可知,此圆具有唯一性,可以把圆心D点作为一个虚拟信标节点建立方程,求得该圆半径,假设有个信标节点,则可以建立q个方程,从而可使用多边极大似然估计法求解。
本节以未知节点使用两个接收机为例来进行叙述,在实际应用中利用天线阵列可获得精确的角度信息,由于基于AOA昀定位算法需要额外硬件的支持,而且测距过程容易受到外界环境的影响,因此不适合在大规模网络中使用。
 热门点击
热门点击
- AOA定位算法
- 无线传感器网络的基本概念
- REF引脚端的驱动
- 模块交互
- WH130-2、WH125、WH155、WH
- 输入缓冲器和低通滤波器
- 精密定位电路
- S-Touch触摸感应应用设计
- 1 2位65Msps 8通道低功耗ADC
- WH10、WH06型预调合成碳膜电位器
推荐技术资料
- FU-19推挽功放制作
- FU-19是国产大功率发射双四极功率电二管,EPL20... [详细]
 公网安备44030402000607
公网安备44030402000607





