
滑雪绕桩机器人
发布时间:2013/11/20 19:07:39 访问次数:9143
本例是一款非常有趣,同时又有一定调试难度的玩法。EDE2116ABSE-8G-E其特点是要使你的机器人在若干个白色圆柱体之间来回穿梭绕行,如图16所示。
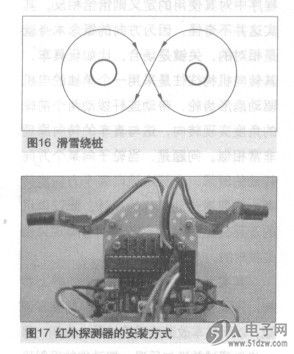
与循线小车类似,本例也采用两只红外探测器,只是两只探测器竖着装在机器人头部两侧,如图17所示。
机器人的程序调试要分两步走。先让机器人能围着一个白色圆柱走出一个圆,主要是根据你所使用的传感器的灵敏度、机器人所带电源、场地等因素调试出合适的左、右电机的运行速度。根据笔者经验,这个圆的半径在15—20cm比较合适。先调一个方向,再调另一个方向,左右两个方向的圆都调试好后,就可以将交叉点的转换语句加进去,完成总体调试。绕桩机器人的软件流程如图18所示。
这款机器人也可以有很多变形玩法,可以让它沿着白色的墙走,成为避障机器人,甚至在程序中加入回溯和存储记忆功能,升级成迷宫鼠(当然,芯片也要换成ATmega168或ATmega328).
无线遥控也是机器人常用的控制方式之一。特别是低成本的方案,更有利于机器人活动的普及。本节向读者介绍如何用汽车遥控钥匙套件实现无线遥控。

本例是一款非常有趣,同时又有一定调试难度的玩法。EDE2116ABSE-8G-E其特点是要使你的机器人在若干个白色圆柱体之间来回穿梭绕行,如图16所示。
与循线小车类似,本例也采用两只红外探测器,只是两只探测器竖着装在机器人头部两侧,如图17所示。
机器人的程序调试要分两步走。先让机器人能围着一个白色圆柱走出一个圆,主要是根据你所使用的传感器的灵敏度、机器人所带电源、场地等因素调试出合适的左、右电机的运行速度。根据笔者经验,这个圆的半径在15—20cm比较合适。先调一个方向,再调另一个方向,左右两个方向的圆都调试好后,就可以将交叉点的转换语句加进去,完成总体调试。绕桩机器人的软件流程如图18所示。
这款机器人也可以有很多变形玩法,可以让它沿着白色的墙走,成为避障机器人,甚至在程序中加入回溯和存储记忆功能,升级成迷宫鼠(当然,芯片也要换成ATmega168或ATmega328).
无线遥控也是机器人常用的控制方式之一。特别是低成本的方案,更有利于机器人活动的普及。本节向读者介绍如何用汽车遥控钥匙套件实现无线遥控。
上一篇:循线机器人是机器人入门和比赛
上一篇:用汽车遥控钥匙遥控机器人
 相关技术资料
相关技术资料- 4-14多芯片型LED模组因各颜色LED的驱动电压
- 11-20滑雪绕桩机器人
- 10-19振动与冲击数据采集大纲
- 相关IC型号
- EDE2116ABSE-8G-E
- 暂无最新型号
热门点击

 公网安备44030402000607
公网安备44030402000607





